- @qq_43381998
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
提供GNSS主要的数据下载地址和数据格式说明文档地址
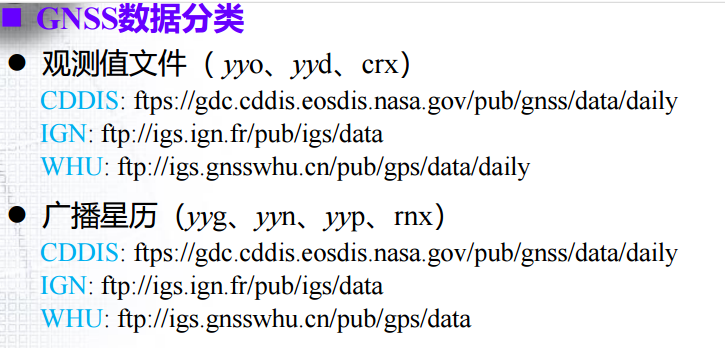
天线改正文件(atx)下载。GBM精密轨道/钟差。
为了简化模型,上述将观测方程分为与高度角无关和高度角相关的部分。
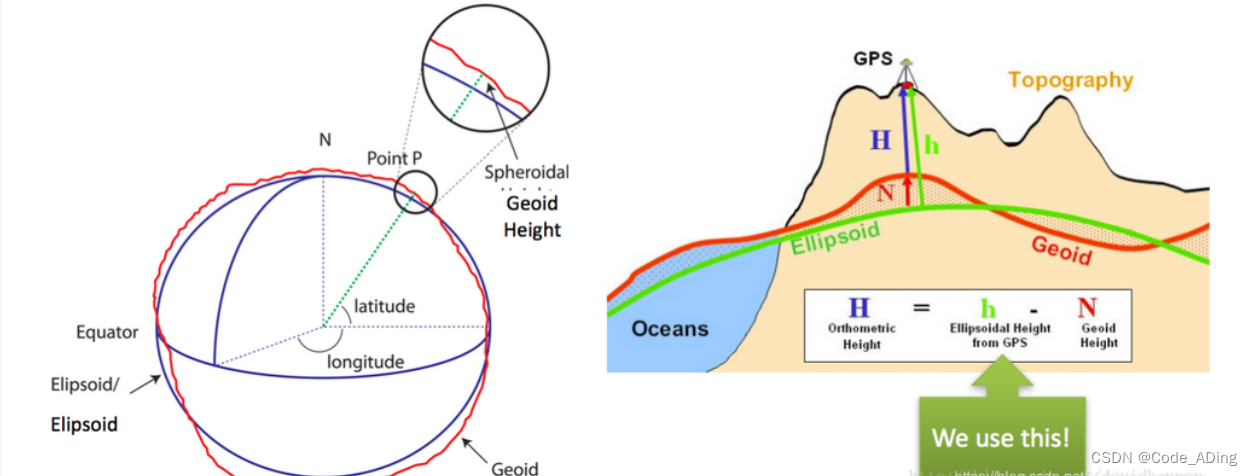
比较可知,两个坐标系使用的参考椭球也非常接近,
伪距单点定位精度较低,但是我们平时导航定位时好像精度没有那么差,难道还有其它的卫星定位技术吗?由此引出了伪距观测值
现有的多系统多频点精密单点定位技术模糊度浮点解,大约需要15分钟达到水平10cm的定位精度,而且定位过程中最好没有太多的信号遮挡,即精密单点定位技术对收敛时间和定位环境有比较严苛的要求;虽然高精度大气产品的通信要求比较大,但我可以把一个区域范围的所有产品下发给到用戶,用戶不需要像网络RTK技术那样上报自身位置,这样在一定程度上可以保护用戶的隐私。有的人宣称,PPP-RTK需要的站密度是要小于网络R

提供GNSS主要的数据下载地址和数据格式说明文档地址
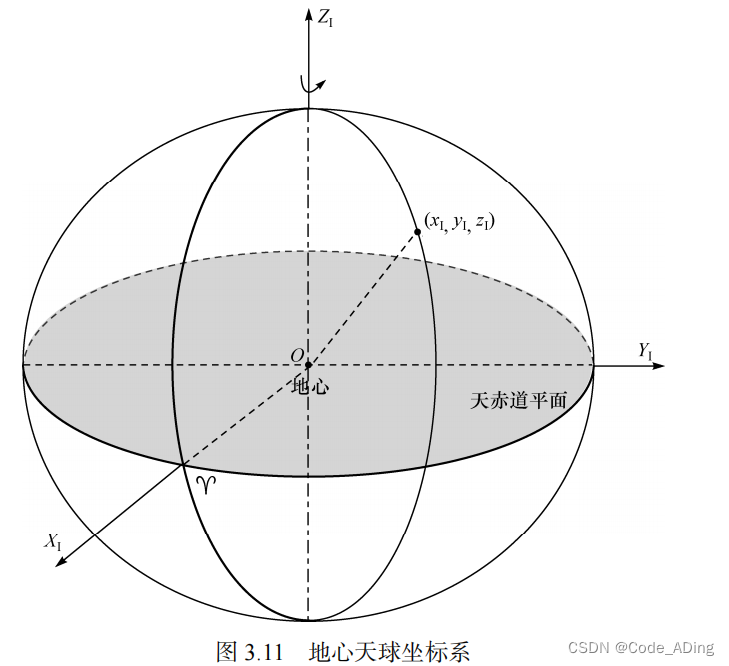
ITRF 的实现采用了 VLBI、SLR、GPS 和 DORIS 四种空间大地测量技术,对各类技术采集的数据进行综合处理,以整个地球(包含海洋及大气)的质量中心为坐标原点,以米为单位,方向初始值采用国际时间局指定的 1984.0 的方向,定向随着时间变动,采用相对于整个地球的水平板块运动无整体旋转的 NNR 条件。原点为地球中心,x,y轴在地球赤道平面内,z轴为地球自转轴,指向北极,x轴指向春分点
天文学研究天体间的几何学和动力学问题,天体如恒星是不随地球自转而运动的。只有不随地球自转运动、在空中固定的坐标系,诸多天体(如恒星的坐标可以保持不变。在空中固定的坐标系便于研究天体间几何学问题。此外不随地球运动的天球坐标系可以作惯性坐标系,这对研究天体动力学问题也是十分重要的条件。卫星也是不随地球运动天体,适合采用天球坐标系研究其运动问题。在空间静止或做匀速直线运动的坐标系统称为惯性坐标系,也称为