- @qq_42330920
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
这两年深切的感受到AI的大爆发,干活越来越快也越来越懂自己了,但是完全依靠外在力量总感觉会对个人的成长不利,有工具不用也更像个傻子。AI本身不会形成壁垒,你能用别人也会用,想要在当前环境更突出,个人技术实力当然是一方面,毕竟AI是个人能力放大器;同时,同样的工具用的更好我觉得也是一方面,建立自己或者企业的知识库,让你的AI更懂自己,更贴近生产需要,作为知识沉淀我觉得是一个很好的方向。
节前就开始听说有个革命性工具问世,大吹特吹,还以为和之前的一些AI噱头一样,一段时间发酵发现火越烧越旺,连不很关注技术圈的朋友都在问我有没有给自己搭一个。于是最近疯狂阅读相关文献,分析了各种用例,看了海量教程,读遍了每份实现指南,发现理论上确实前景非常广阔,甚至可能改变以后的工作方式,当然现在会有一定门槛,未来更好用的产品一定是服务大众的。趁着最近在兴头上,就以一个开发者的角度总结一下,大家都在吹
参考前文有具体的openclaw用法和安装教程,本章教学怎么接入飞书机器人。
从 0 开始在 Ubuntu 22.04 安装 OpenClaw(2026.3.2),接入试用模型(ModelScope),允许其他内网电脑,不论是Windows/linux/mac均可访问。
节前就开始听说有个革命性工具问世,大吹特吹,还以为和之前的一些AI噱头一样,一段时间发酵发现火越烧越旺,连不很关注技术圈的朋友都在问我有没有给自己搭一个。于是最近疯狂阅读相关文献,分析了各种用例,看了海量教程,读遍了每份实现指南,发现理论上确实前景非常广阔,甚至可能改变以后的工作方式,当然现在会有一定门槛,未来更好用的产品一定是服务大众的。趁着最近在兴头上,就以一个开发者的角度总结一下,大家都在吹
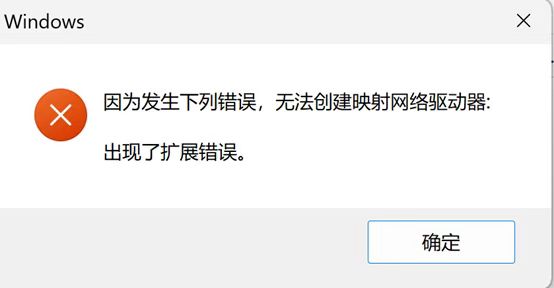
Win11映射网络驱动器访问时虚拟机文件系统时,遇见了拓展错误,一般系统不会出现这个问题,少概率Windows缺失了文件会这样,这里提供不重装系统的解决方案