
写文章




- @qq_39744225
简介
该用户还未填写简介
擅长的技术栈
未填写擅长的技术栈
可提供的服务
暂无可提供的服务
【ollama部署本地语言模型qwen参数调整,改变语气及性格】
本文介绍了如何使用Ollama部署本地Qwen语言模型并调整参数以改变输出风格。主要内容包括:1)关键参数说明(temperature、top_k、top_p等)及其推荐设置范围;2)Modelfile编写方法,包含模型基础配置、系统消息定义和示例对话;3)模型重建步骤,通过Modelfile创建自定义模型;4)桥接器配置修改方法。通过调整这些参数,可以控制生成文本的创造性、多样性、连贯性等特性,

【ollama部署本地语言模型qwen参数调整,改变语气及性格】
本文介绍了如何使用Ollama部署本地Qwen语言模型并调整参数以改变输出风格。主要内容包括:1)关键参数说明(temperature、top_k、top_p等)及其推荐设置范围;2)Modelfile编写方法,包含模型基础配置、系统消息定义和示例对话;3)模型重建步骤,通过Modelfile创建自定义模型;4)桥接器配置修改方法。通过调整这些参数,可以控制生成文本的创造性、多样性、连贯性等特性,
【ollama本地部署,与嵌入式设备进行通信教程】
教程提供了详细的配置步骤说明。通过这套方案,用户可以在没有公网IP和云服务器的情况下,实现本地AI模型的部署和嵌入式设备通信功能。

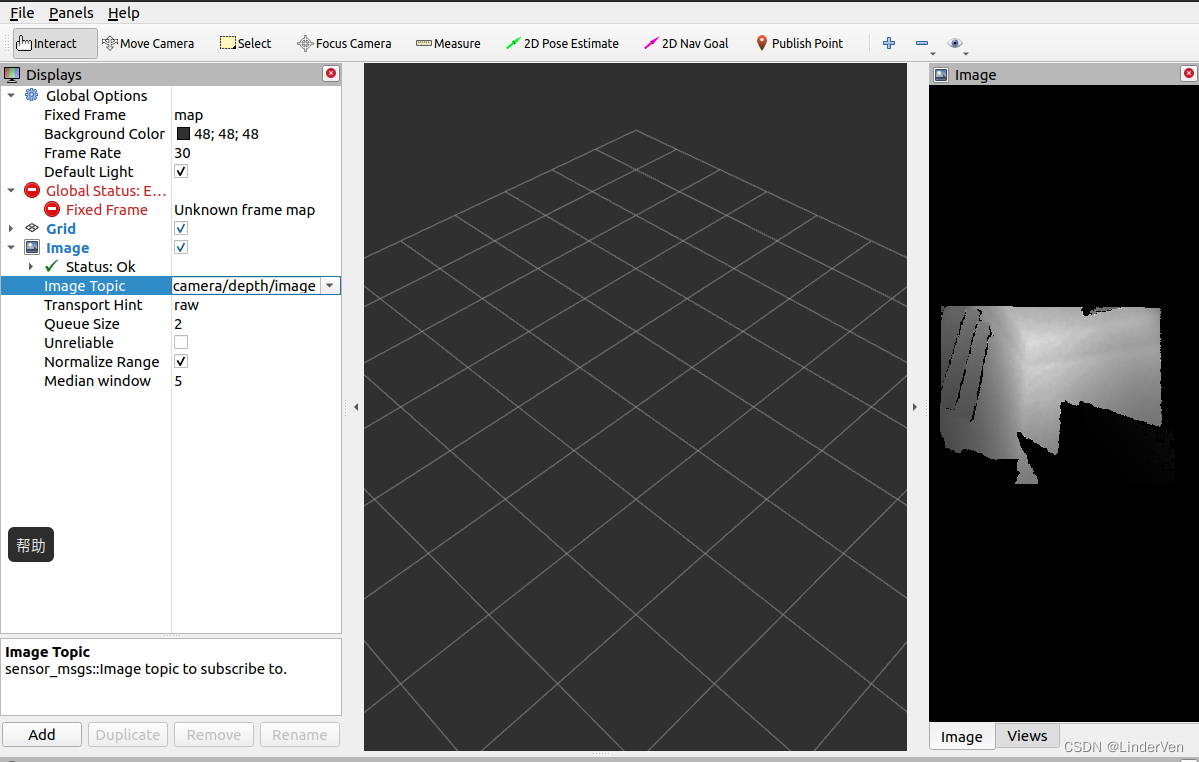
【VMware Ubuntu ros noetic使用Astra S相机查看图像及点云数据】
之类的错误,是因为CMakeLists文件中没找到libuvc包,进入ros_astra_camera功能包里面的CMakeLists.TXT文件进行添加,将。功能包的原因,一般用安装命令基本都能安装,但是相对于libuvc的功能包,能安装上,但是编译的时候会找不到路径,如果出现。由于第一次没装rgbd-launch 包;点击 file ——> open config。依赖安装好了以后就可以进行编
到底了