




- @qq_37680545
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
【ROS&GAZEBO】多旋翼无人机仿真(一)——搭建仿真环境【ROS&GAZEBO】多旋翼无人机仿真(二)——基于rotors的仿真【ROS&GAZEBO】多旋翼无人机仿真(三)——自定义多旋翼模型【ROS&GAZEBO】多旋翼无人机仿真(四)——探索控制器原理【ROS&GAZEBO】多旋翼无人机仿真(五)——位置控制器【ROS&GAZEBO】多旋
【ROS&GAZEBO】多旋翼无人机仿真(一)——搭建仿真环境【ROS&GAZEBO】多旋翼无人机仿真(二)——基于rotors的仿真【ROS&GAZEBO】多旋翼无人机仿真(三)——自定义多旋翼模型【ROS&GAZEBO】多旋翼无人机仿真(四)——探索控制器原理【ROS&GAZEBO】多旋翼无人机仿真(五)——位置控制器上一篇我们说了rotors中使用了位
这两天有小伙伴问到在安装完rotors后出现如下问题:这个问题其实是ros环境没有配置好,运行下面的命令,将catkub_ws加入ros的工作空间mkdir -p ~/catkin_ws/srccd ~/catkin_ws/srccatkin_init_workspace# initialize your catkin workspacewstool initcd ~/catkin_ws/catk
本人由于课题需要,研究了如何在ROS和GAZEBO环境中搭建多旋翼无人机可视化仿真环境。对搭建过程整理并分享给需要的伙伴们,欢迎大家互相交流!
【ROS&GAZEBO】多旋翼无人机仿真(一)——搭建仿真环境【ROS&GAZEBO】多旋翼无人机仿真(二)——基于rotors的仿真【ROS&GAZEBO】多旋翼无人机仿真(三)——自定义多旋翼模型【ROS&GAZEBO】多旋翼无人机仿真(四)——探索控制器原理(1)原理在gazebo编写控制器有两种方式,一种是直接编写gazebo插件,另一种是编写ros节点,这
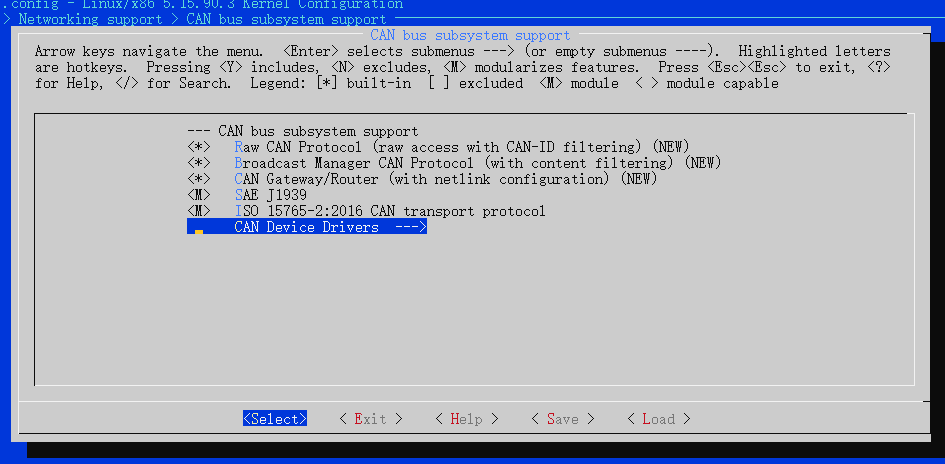
这一篇文章主要介绍一下 WSL2 及 ubuntu20.04 CAN 驱动的安装,首先说一下介绍本文的目的。大家肯定都接触过 ubuntu 系统,但是我们常用的操作系统都是 Windows,想要切换到 ubuntu 系统要么装虚拟机,要么装双系统。双系统必然是麻烦的,而且得两个系统来回切换,而虚拟机的代表就是 vmware,简单的使用还行,但是涉及到三维仿真就会比较卡顿了,而且占用资源也是比较大的
为什么需要四元数从人的直观来看,欧拉角或者姿态角是最直观的能感受到三维旋转的表示方法。因此,在做多旋翼或者其他机器人的姿态控制时,最能够直观接受的方法就是欧拉角姿态控制。可能很多人会觉得,为什么需要那么多花里胡哨的方法呢,控制俯仰-滚转-航向三个姿态角就能够稳定姿态了。但是,用姿态角进行控制是有前提的,那就是小角度假设,如果不满足小角度的条件,那么姿态角控制就不适用。姿态角是存在旋转顺序的,并且存
【ROS&GAZEBO】多旋翼无人机仿真(一)——搭建仿真环境【ROS&GAZEBO】多旋翼无人机仿真(二)——基于rotors的仿真【ROS&GAZEBO】多旋翼无人机仿真(三)——自定义多旋翼模型上一篇介绍了如何用rotors进行仿真,这一篇继续介绍在ROS&GAZEBO中如何自定义多旋翼模型。搭建模型在GAZEBO搭建模型第一步是建一个模型,可以在GAZEBO
【ROS&GAZEBO】多旋翼无人机仿真(一)——搭建仿真环境【ROS&GAZEBO】多旋翼无人机仿真(二)——基于rotors的仿真【ROS&GAZEBO】多旋翼无人机仿真(三)——自定义多旋翼模型【ROS&GAZEBO】多旋翼无人机仿真(四)——探索控制器原理【ROS&GAZEBO】多旋翼无人机仿真(五)——位置控制器【ROS&GAZEBO】多旋
这一篇文章主要介绍一下 WSL2 及 ubuntu20.04 CAN 驱动的安装,首先说一下介绍本文的目的。大家肯定都接触过 ubuntu 系统,但是我们常用的操作系统都是 Windows,想要切换到 ubuntu 系统要么装虚拟机,要么装双系统。双系统必然是麻烦的,而且得两个系统来回切换,而虚拟机的代表就是 vmware,简单的使用还行,但是涉及到三维仿真就会比较卡顿了,而且占用资源也是比较大的
