




- @qq_30460905
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
0. 已经建立建立ros项目工程, 在功能包CMakeLists.txt目录下打开终端, 执行: code . 打开ros项目1. 点击F5, 启动debug(Start Debugging), 弹出对话框, 点击打开launch.json.2. 将configurations里面的东西删掉如下:{// Use IntelliSense to learn about possible attrib
注意cmake使用中c++编译器选择问题:gcc编译器没有-stdlib 这样命令行选项,LLVM clang编译器支持。 这是因为clang为您提供链接LLVM标准C ++库( libc ++ )或GNU标准C ++库( libstdc ++ ),而gcc只支持 libstdc ++ 。
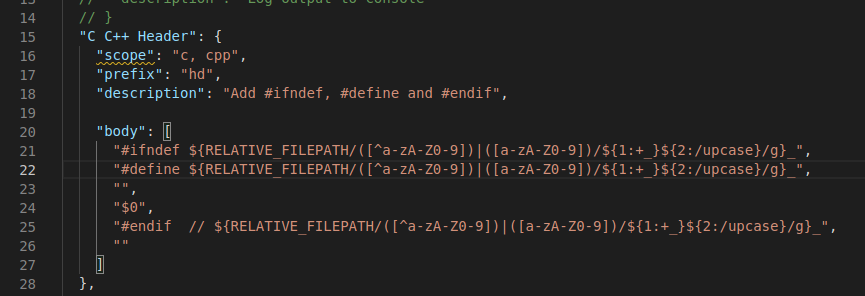
为了方便多人协作,大家都会尽可能保证程序风格统一,人工检查效率比较低,一半会借助程序工具自动做一些检查,借助C/C++ Snippets自己编写了符合谷歌风格的header guard
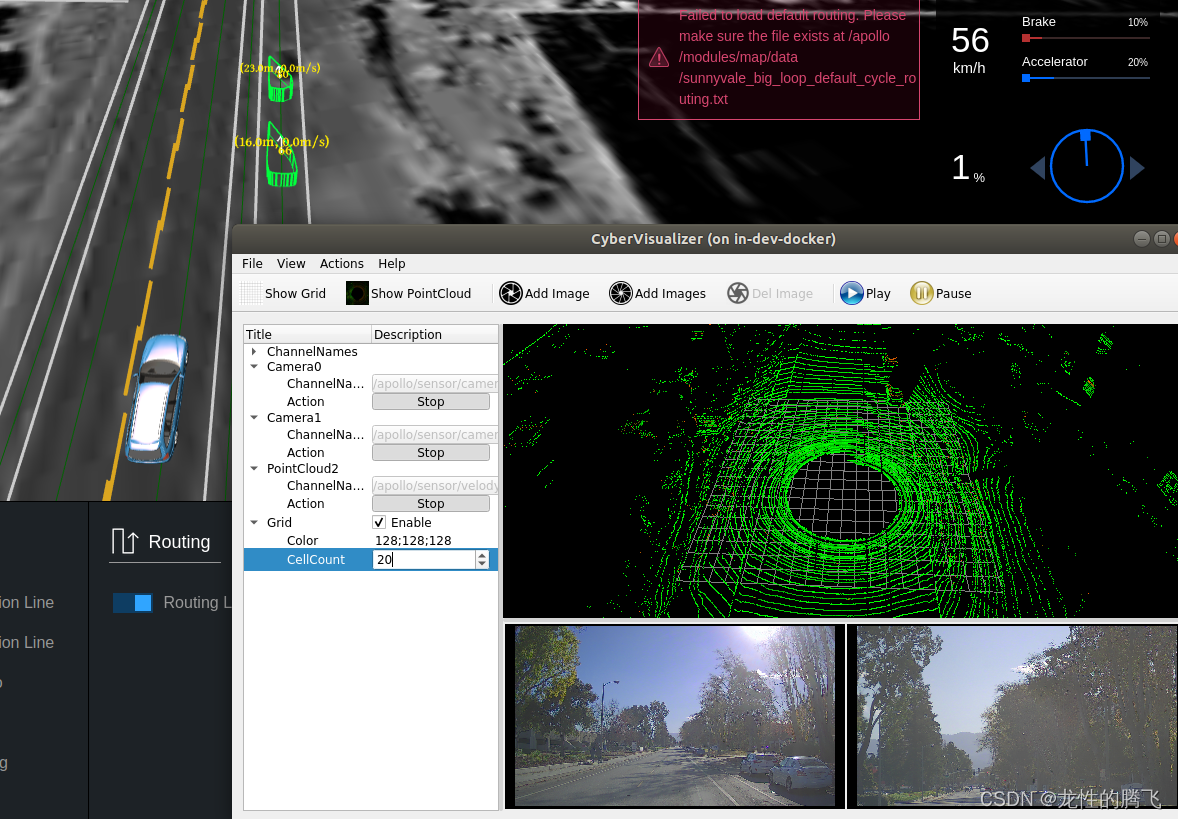
之前一直有看过apollo的程序,一般都是参考某个模块直接去看代码,并没有完整的安装跑一下官方的程序,趁假期简单安装熟悉了一下基于cyber的apollo7.0, 准备后面完整的调试一下感知各个模块。我用的笔记本环境:Ubuntu18.04 cuda10.2 nvidia-driver 470.103.01 ,GPU GTX 1650的,只有4个G显存,有点卡,勉强能跑起来, 主要就是参考apo
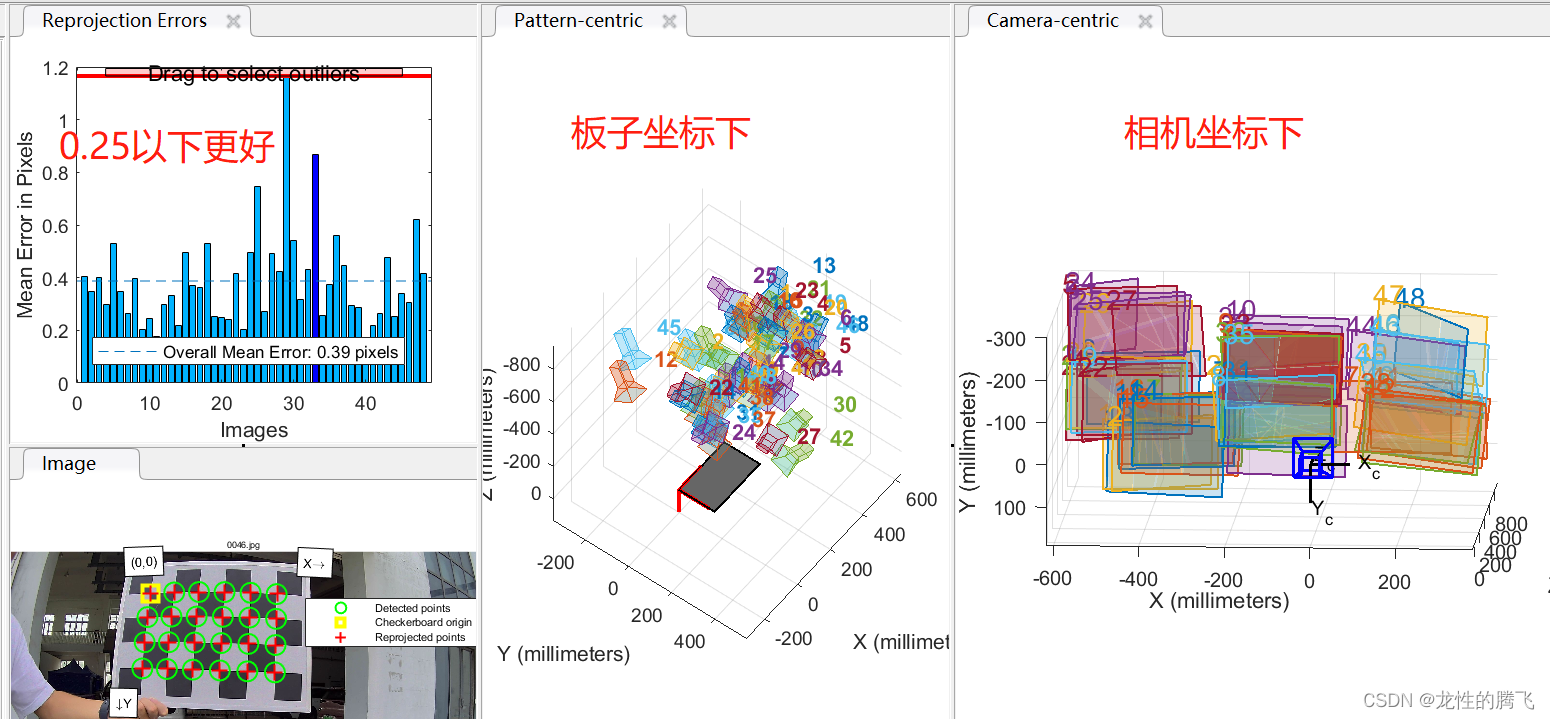
联合标定是做多传感器融合的基础工作,也是一个没有最好只有更好的研究方向,相关论文也是层出不穷,网上也有许多开源的工作,包括Autoware的工具箱我也试过,感觉标定效果不是特别好,标定效果不稳定,有时候好,有时候不好(也可能当时经验有限,好多点没注意),后来Matlab2020b推出了激光雷达和相机的联合标定教程,简单试了一下,效果不错,2020b中有个bug, 2021a中已经修复了,并且把de
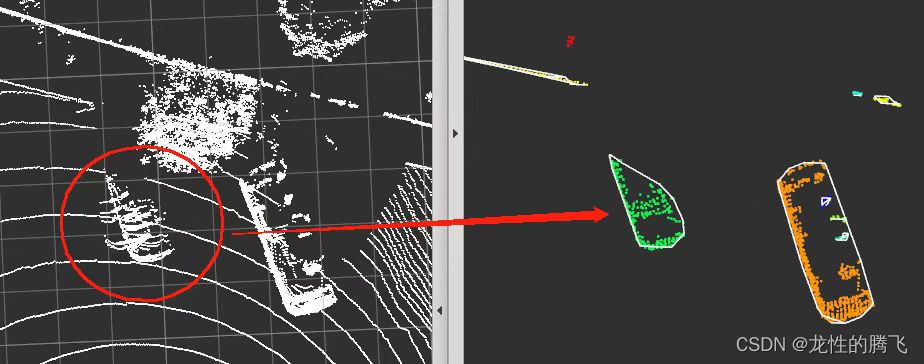
本篇博客主要解释一下上篇博客中运动补偿的计算部分,简单来说就是一个利用四元数球面线性插值(Slerp)计算每个点的位姿,然后根据坐标变换关系将该位姿下的坐标变换到需要补偿到的某个时间点下坐标.
大部分步骤和网上都是一样的,我就不再多说,简单描述一下,说一下我遇到的问题及解决的方法:1. 预先下载官网下载SDK Manager登录账号选择主机(主机可以不用选,确实好像没啥用,干嘛要给自己电脑再装呢。。。)和Xavier型号,为了避免等待下载和安装,我点选择了下面那个先下载后安装,好几个G呢,晚上让它自己下就好了,下完退出,改天(至少留出半天时间准备debug)。2. 准备安装...
下面简单记录一下我利用ros标定相机参数的过程,Ubuntu 16.04 ,摄像头用的罗技C920ROSwiki有相机矫正的官方文档,有单目的也有立体相机的教程,建议直接看原文,原汁原味:链接1、相机标定第一步,准备一张标定板,打印出来下载标定板为8x6,我用A4纸打印出来为,用直尺量square边长为24.5mm(这个根据自己标定板的大小自己量,大点好),即0.0245m,作为标定输...
1. 改变话题名 参考链接:https://blog.csdn.net/ethan_guo/article/details/80262650rosbag play file.bag /foo:=/bar#/foo是原topic,/bar是新topic2. 改变frame_id 参考链接:http://wiki.ros.org/bag_tools#change_frame_id.py(1) 参考说明
文章主要总结一下调试某位大神的程序过程和遇到的问题,代码文章参考来源:摄像头识别手写数字1、工作环境Ubuntu16.04,opencv2, IDE : Qt5.9.1Creator, 编译器:cmake下载了大神的文章程序后发现没有main文件,就是需要打开摄像头的程序,由于对opencv 也是刚入门,走了不少弯路,针对原来的程序主要做了一下更改2.工作历程(1)写了主程序main.cpp将打开