- @qq_23096319
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
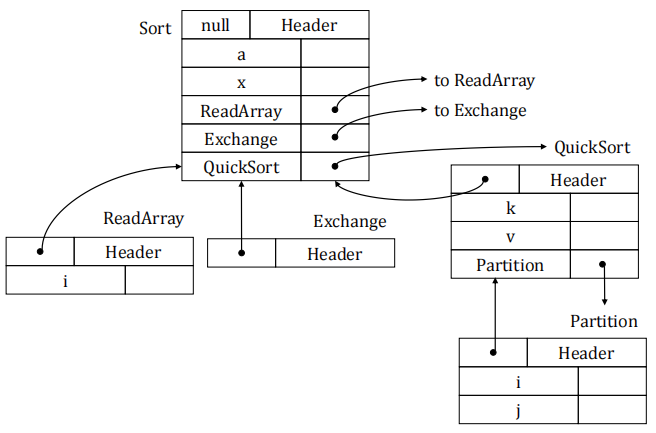
在之前的语法制导翻译中,我们学习了翻译模式,为文法定义匹配的语义动作,通过这个“动作”可以生成代码,但为了进行与机器无关的代码优化工作,选择生成中间代码(四元式),而不是机器代码。下面对每一类语句设计翻译模式,这里一个翻译模式就是一个“算法”。
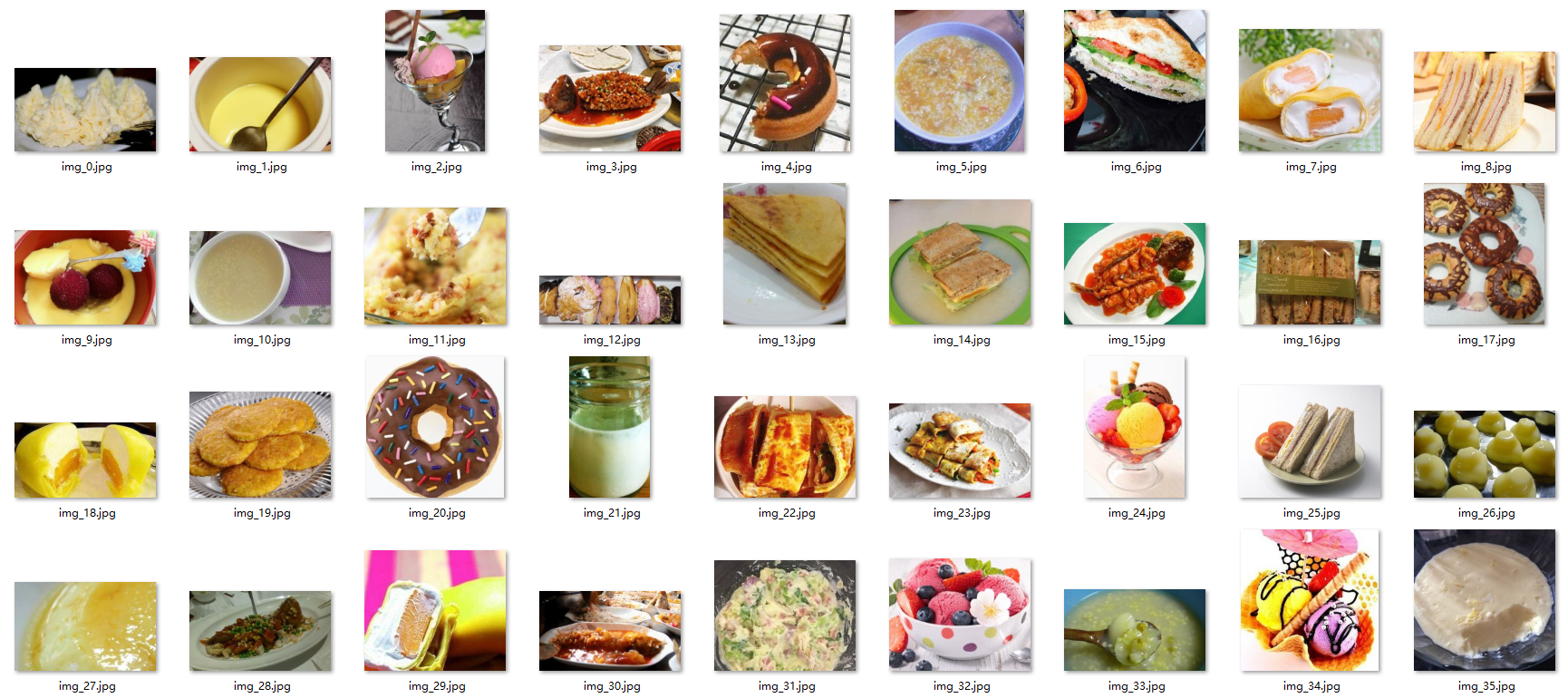
参加了华为一个小比赛第四届MindCon-爱(AI)美食–10类常见美食图片分类,本来想实践机器学习课程的知识,后来发现图像分类任务基本都是用神经网络做,之前在兴趣课上学过一点神经网络但不多,通过这样一个完整的项目也算入门了。
断断续续地折腾了一阵子,总算基本配置完成了,用这篇博客记录一下。操作系统:ubuntu 22.04 LTS。

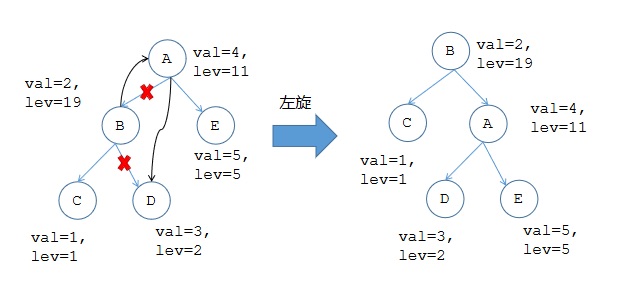
Treap就是Tree+heap,首先有二叉搜索树(BST)的数据,treapCnt记录当前的节点总数,节点和键值的映射key,每个节点的左右儿子childs,以及一个键可能存在多个副本,用cnt记录副本数,size记录子树大小,用于查找第k大元素。堆相关的数据:每个节点的优先级priority,这个优先级在创建节点时随机生成,保证了Treap的深度不会太大。
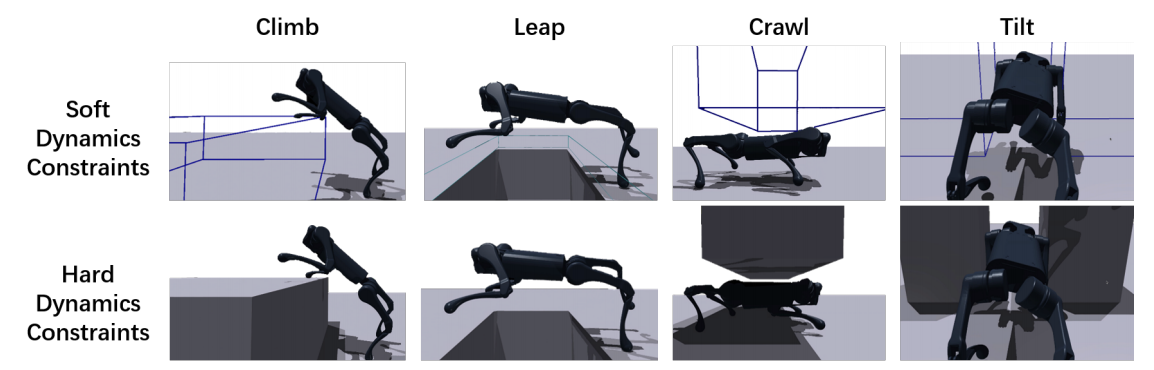
跑酷对腿部机动性是一项巨大的挑战,要求机器人在复杂环境中快速克服各种障碍。现有方法可以生成多样化但盲目的机动技能,或者是基于视觉但专门化的技能,这些技能通过使用参考动物数据或复杂的奖励来实现。然而,自主跑酷需要机器人学习既基于视觉又多样化的技能,以感知并应对各种情景。在这项工作中,我们提出了一种系统,用于学习一个单一的端到端基于视觉的跑酷策略,该策略具有多样化的跑酷技能,并使用简单的奖励,而不需要
参加了华为一个小比赛第四届MindCon-爱(AI)美食–10类常见美食图片分类,本来想实践机器学习课程的知识,后来发现图像分类任务基本都是用神经网络做,之前在兴趣课上学过一点神经网络但不多,通过这样一个完整的项目也算入门了。
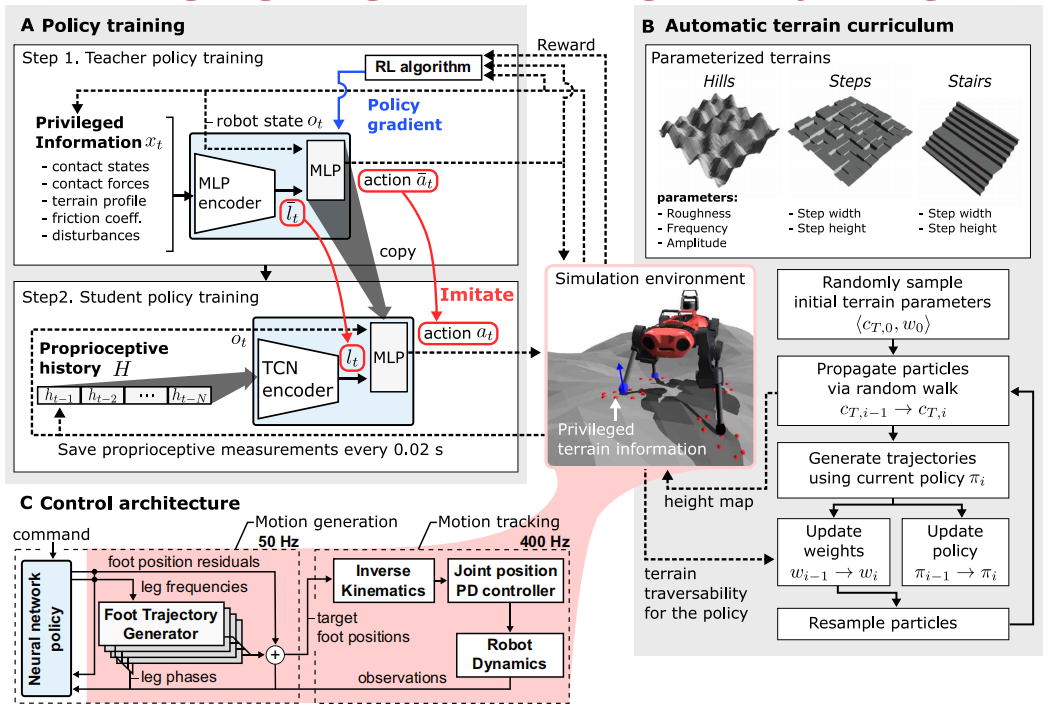
项目链接:https://leggedrobotics.github.io/rl-blindloco/像LiDAR和相机等外部传感器无法感知地面的诸如摩擦和顺应性等物理特性,在雪地、覆满植被的具有挑战性的地形下,需要将机器人的本体感受作为输入,控制器快速产生针对如保持平衡,避免自我碰撞等等多个目标的全身轨迹规划。读的第一篇Anymal相关的论文,没太搞清楚问题的formulation呜呜,几乎ge
中维护了以下段:(1,3,2),(4,5,1),(6,9,3),(10,12,2),此时还未执行过操作2,3,标签和。有一个地方我调了很久,就是操作5中输出最多得票的编号最小者,这个编号经过层层映射,早已不是容器内。回应操作5,这个在之前的3月份的第四题通信管理中也用到过,详见我的博客。② 对于操作2,3,我们并不需要真的修改容器内的值,只需要改变标签和。而对于操作2,我们引入并查集,将多个。的最

卡尔曼滤波器有一系列递推公式描述,提供一种高效可计算的方法来估计过程的状态,并使。它的应用广泛而强大,可以各级信号的过去和当前状态,甚至能估计将来的状态,即使是在无法得知模型的确切性质。.........
在飞行器姿态解算中一般采用四元数表达旋转,个人理解,旋转矩阵用3*3的矩阵以及附加的6个非线性约束(列向量之间相互正交且模长为1)描述了旋转,而四元数通过4个数以及一个约束(单位四元数)描述了同样的信息量,类似对于一个线性方程组,通过代换消元的方式减少约束,减少变量数,达到减少计算量的目的。实际上,惯性导航系统中是通过四元数实现快速循环迭代,它能够以1000Hz的速度更新运动对象的姿态。(注意顺时