




- @qq_21405333
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
Jump Point Search通过跳过不必要的节点评估,加速了路径规划过程,特别适合用于大规模、开放区域的网格地图。它在保持A*算法路径最优性的同时,大幅提高了效率。
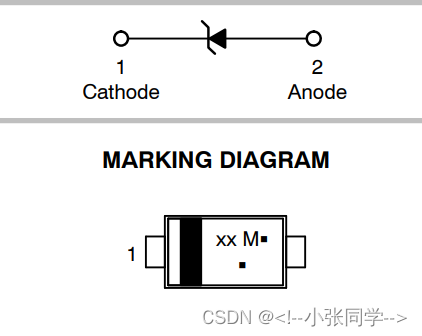
Anode :阳极Cathode :阴极根据上图原理图与实物的对应,有线的一边是阴极如下图
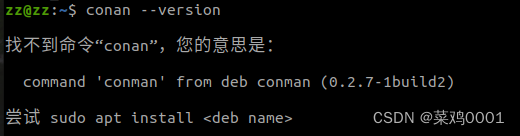
第一个路径是文件位置,路径是/home/zz/.local/bin。第二步:打开主目录下的./bashrc 文件,在最后一行添加。安装完成后提示 未找到命令 如图。找到安装位置,如下图。第三步:在终端中输入。
costmap_converter 是teb中的一部分,因此需要teb配合使用teb_local_planner官方介绍点这teb官方教程teb的安装与demo安装下面以melodic版本为例安装teb_local_planner1.从官方 ROS 存储库安装 teb_local_planner 包(二进制安装)sudo apt-get install ros-melodic-teb-local-
用stm32模拟遥控器初始化电调(电调行程校准)(电调解锁)看前须知对电调的控制和对舵机的控制很相似,都是使用pwm输出一串方波进行控制。使用32初始化pwm,默认大家都有所了解。使用万用表测量频率,COM端接pwm信号线,另一根表笔接地,如此测出的频率才正确,反之则会大一倍。电调在一个pwm方波周期内识别的是脉宽的长度,而不是占空比,最高油门是2ms的脉宽,最低油门是1ms的脉宽(为什么不是占空
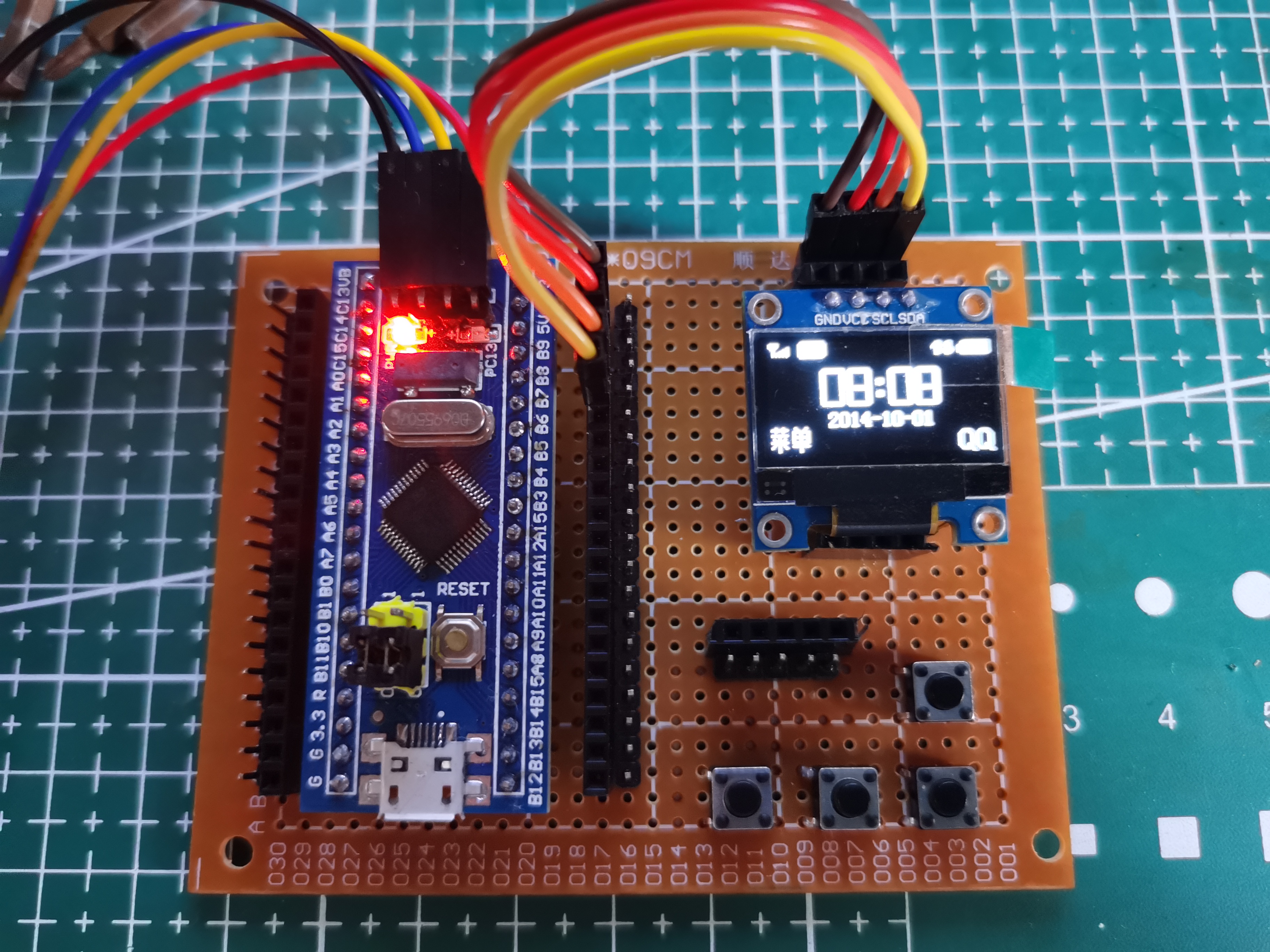
oled的技术文档中的例程好像时用keil4开发的,keil5打开时有问题,因此用自己建的c8t6工程做了移植,亲测有效。首先挂出链接链接:https://pan.baidu.com/s/19H5pTt2JeQYA_LBdDxZRag提取码:1234工程的简单说明端口说明使用端口为PB8,PB9PB8用作时数据线SDA,PB9用作时钟线SCL效果如图IIC端口更改在oled.c中更改需要使能的端口
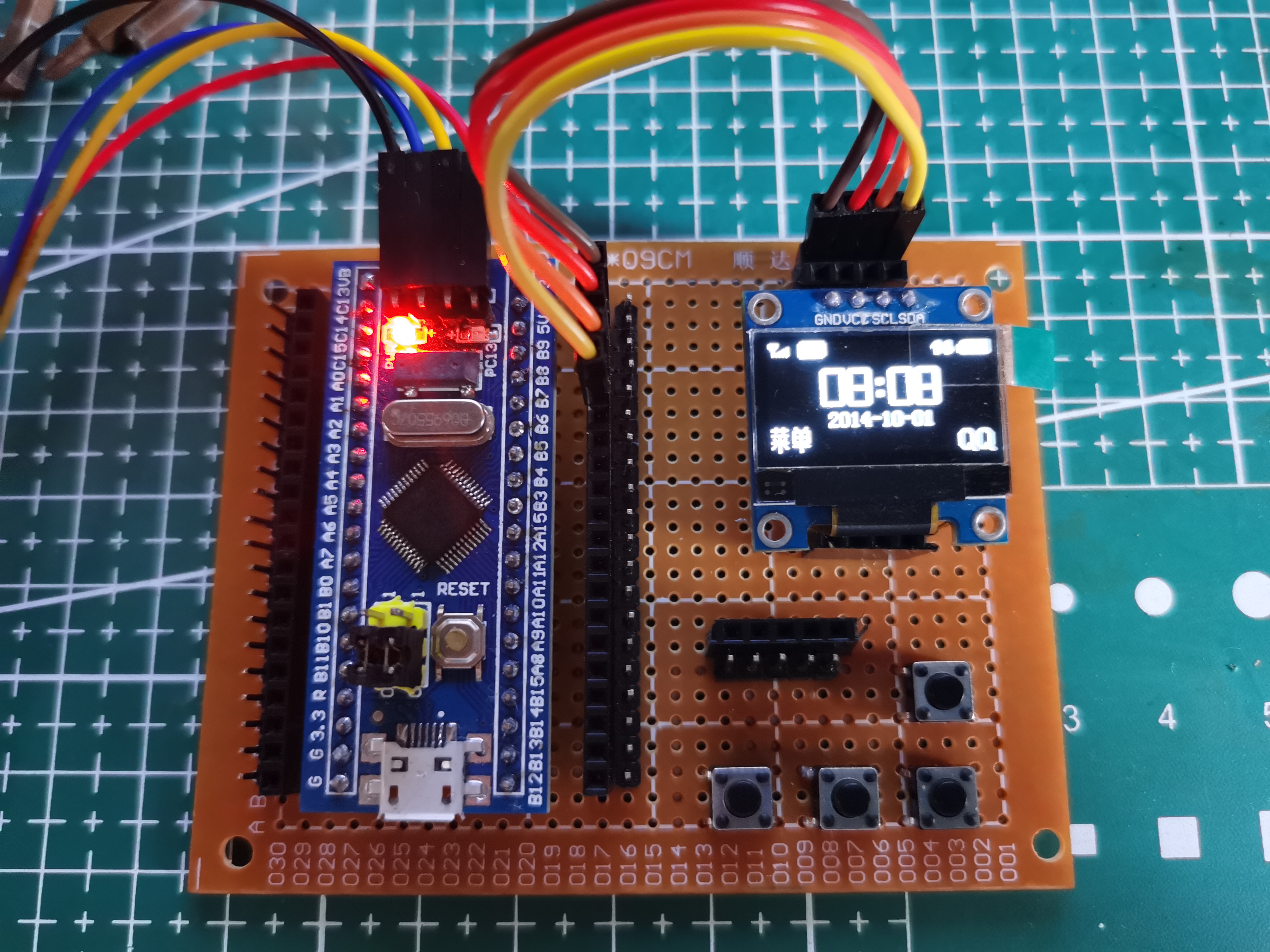
oled的技术文档中的例程好像时用keil4开发的,keil5打开时有问题,因此用自己建的c8t6工程做了移植,亲测有效。首先挂出链接链接:https://pan.baidu.com/s/19H5pTt2JeQYA_LBdDxZRag提取码:1234工程的简单说明端口说明使用端口为PB8,PB9PB8用作时数据线SDA,PB9用作时钟线SCL效果如图IIC端口更改在oled.c中更改需要使能的端口
前言:借鉴网上的教程,项目做了5天,环境搭建好了,只需要进一步的编程,这时想要把环境备份一下,本来想做成.iso或者.img的镜像,但是在网上找了好久都没有可行的方案,有些需要装软件的,我的Linux也装不上。之后接下来的5天,我就一直在思考怎么备份。然后我找到的解决方案,个人认为适用于大多数Linux系统。(在SD卡中的系统)我的环境| 硬件配置(我用到了哪些东西)1.win10电脑2.一个wi