
写文章




- @python_plus
简介
该用户还未填写简介
擅长的技术栈
未填写擅长的技术栈
可提供的服务
暂无可提供的服务
FLTRNN:基于大型语言模型的机器人复杂长时任务规划
FLTRNN框架通过任务分解、递归神经网络和规则思维链的设计,解决了LLM在长时任务规划中常见的忠实性问题。

深度学习中的pipeline和baseline
指能实现上述过程的基础模型。
基于视觉-语言模型的机器人任务规划:ViLaIn框架解析
本文介绍了ViLaIn框架如何通过视觉和语言模型生成符号化任务描述,并借助符号规划器为机器人生成可执行的任务计划。

FLTRNN:基于大型语言模型的机器人复杂长时任务规划
FLTRNN框架通过任务分解、递归神经网络和规则思维链的设计,解决了LLM在长时任务规划中常见的忠实性问题。
基于视觉-语言模型的机器人任务规划:ViLaIn框架解析
本文介绍了ViLaIn框架如何通过视觉和语言模型生成符号化任务描述,并借助符号规划器为机器人生成可执行的任务计划。
Faster RCNN系列3——RPN的真值详解与损失值计算
本文详细介绍了RPN中类别真值和偏移量真值的求解过程,参考书籍《深度学习之Pytorch物体检测实战》

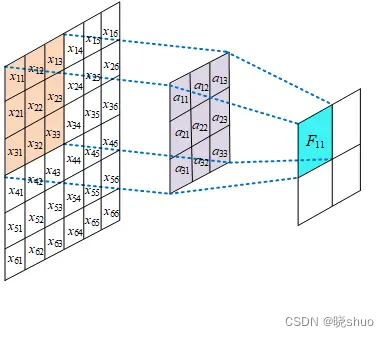
CNN的权值共享-平移不变性-空间局部性
CNN的权值共享指的是:对于一张输入图像,用同一个去提取该图像的特征,该卷积核的值即可作为该卷积操作共享的权值。
Faster RCNN系列4——生成Proposal与RoI
《深度学习之Pytorch物体检测实战》

阅读笔记6——通道混洗
本文为阅读《深度学习之Pytorch物体检测实战》的笔记
FLTRNN:基于大型语言模型的机器人复杂长时任务规划
FLTRNN框架通过任务分解、递归神经网络和规则思维链的设计,解决了LLM在长时任务规划中常见的忠实性问题。