




- @prinTao
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
摘要:本文介绍了在Android Studio中使用JNI和NDK集成OpenCV 4.x的方法。内容包括:环境准备(安装NDK、CMake和OpenCV SDK)、导入OpenCV库模块、配置JNI本地调用(含C++和Java代码示例)、CMakeLists.txt配置、build.gradle设置以及常见问题解决方案。实现通过JNI调用OpenCV C++接口进行图像处理,并提供后续扩展建议。
很多教程都无法正常在新版工作,因此这里我更新一下教程。后面会再写一个如何加入cpp的教程。
CUDA(BLAS)提供了高效计算线性代数的方法。有三级API

在传统cv中,涉及到颜色的任务有时会用hsv颜色模型。而在深度学习中全在用rgb,推测这一问题没有被深度学习领域的作者发现。于是今天我做了实验,发现只是有轻微提升,可能是rgb映射到hsv早已被模型学到了。点子失效。。。...
如果图像不是正方形,使用crop或者transform变换配置文件修改解释运行配置文件检查输入图像是不是8bit,不是的话需要转换。变成。

在传统cv中,涉及到颜色的任务有时会用hsv颜色模型。而在深度学习中全在用rgb,推测这一问题没有被深度学习领域的作者发现。于是今天我做了实验,发现只是有轻微提升,可能是rgb映射到hsv早已被模型学到了。点子失效。。。...
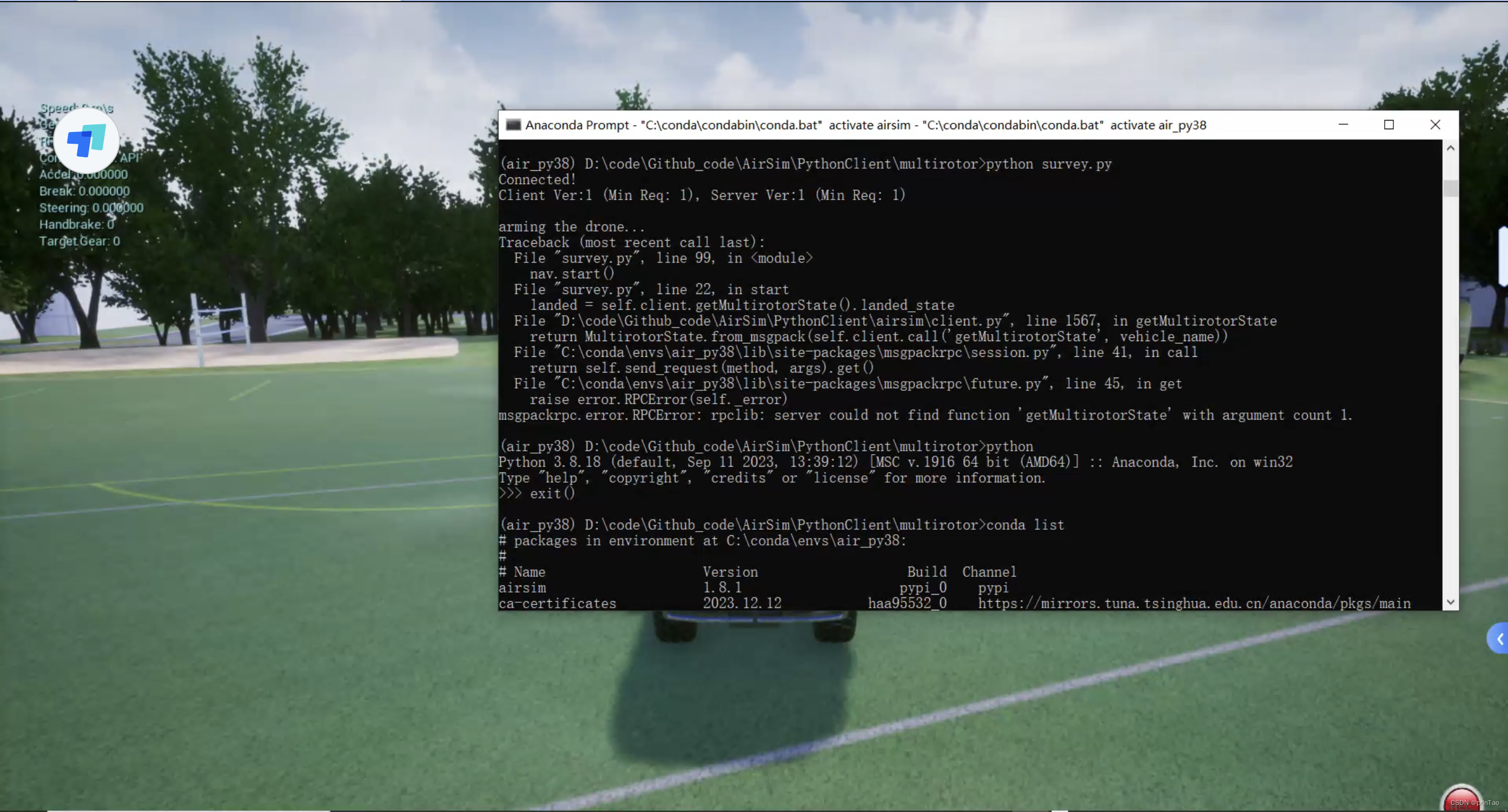
使用airsim 1.8.1编译完成,进过block项目在cpp测试后,开始踩坑使用python。使用或者pip安装airsim。或者此时,windows电脑的环境信息。
作为导师组织参与 GSoC 的开源项目涵盖许多领域,包括在 AI/ML、安全、云、开发工具、科学、医学、数据、媒体等领域从事有趣工作的项目!我们还鼓励您查看导师指南、我们的“ Google Summer of Code 简介”视频,以及我们关于为何开源项目很高兴成为 GSoC 计划一部分的短视频。访问该计划网站并阅读导师指南,了解成为导师组织意味着什么以及如何准备你的社区(提示:拥有大量兴奋、专注
introduce主流方法两种消除运动模糊的技术,一个叫做Coded Exposure Photography(编码曝光),确切的说是一种利用了Flutter Shutter(震颤快门)的编码曝光技术。多用于全局模糊。另外一种则是Motion Invariant Photography(运动不变摄影)。多用于局部运动物体模糊。运动模糊的基本模型一个典型的场景,这里面背景和部分物体是固定的,但有一个
在传统cv中,涉及到颜色的任务有时会用hsv颜色模型。而在深度学习中全在用rgb,推测这一问题没有被深度学习领域的作者发现。于是今天我做了实验,发现只是有轻微提升,可能是rgb映射到hsv早已被模型学到了。点子失效。。。...