
写文章




- @old_power
简介
该用户还未填写简介
擅长的技术栈
未填写擅长的技术栈
可提供的服务
暂无可提供的服务
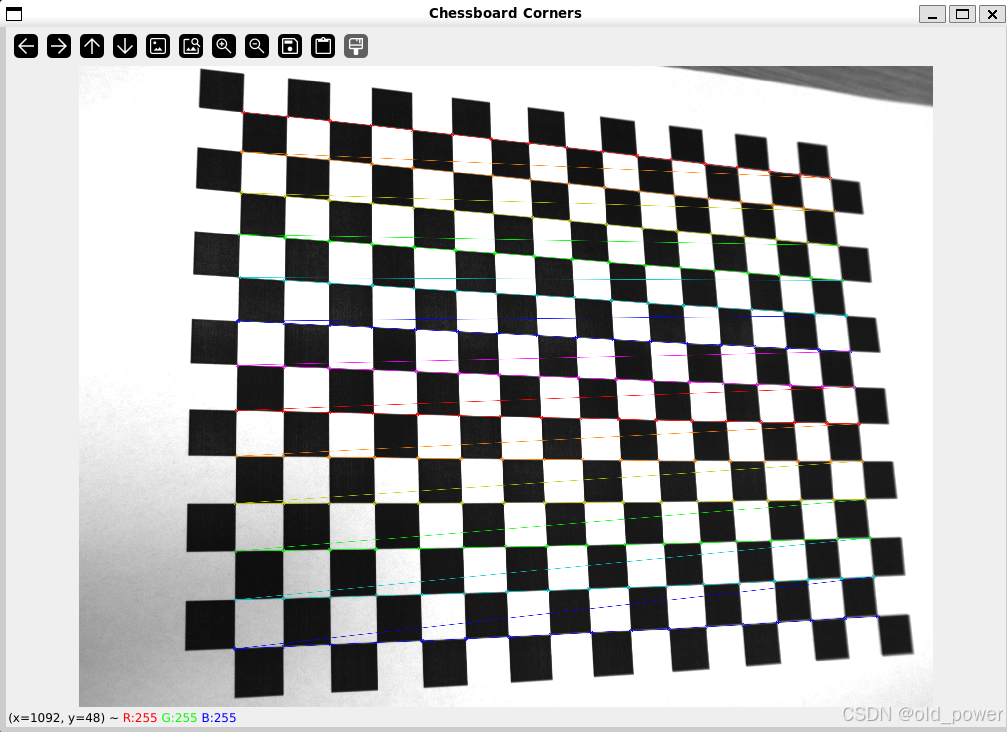
OpenCV相机标定:通过棋盘格计算相机内参矩阵和畸变系数
OpenCV相机标定:通过棋盘格计算相机内参矩阵和畸变系数
【OpenCV】在Liunx中配置OpenCV环境变量
在Liunx中配置OpenCV环境变量
Linux 环境下编译安装 OpenCV 4.8.x
Linux 环境下编译安装 OpenCV 4.8.x
OpenCV版本和VTK、Eigen、CUDA、OpenCL版本对应关系
OpenCV版本和VTK、Eigen、CUDA、OpenCL版本对应关系。
Python基于YOLOv8和OpenCV实现车道线和车辆检测
使用YOLOv8(You Only Look Once)和OpenCV实现车道线和车辆检测,目标是创建一个可以检测道路上的车道并识别车辆的系统,并估计它们与摄像头的距离。该项目结合了计算机视觉技术和深度学习物体检测。

Linux(Ubuntu24.04)源码编译安装OpenCV4.6.0
Linux(Ubuntu24.04)源码编译安装OpenCV4.6.0

OpenCV版本与常见项目场景建议
OpenCV版本与常见项目场景建议
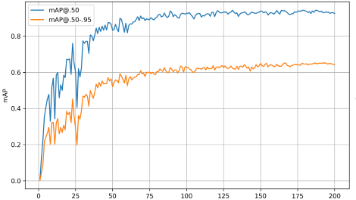
目标检测任务的评估指标mAP50和mAP50-95
mAP50 和 mAP50-95 是目标检测任务中常用的评估指标,用于衡量模型在不同 交并比(IoU)阈值 下的平均精度(Average Precision, AP)。它们的区别主要体现在 IoU 阈值范围 上。
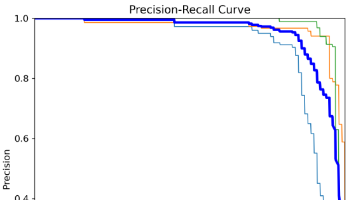
目标检测任务的评估指标P-R曲线
P-R曲线(Precision-Recall Curve) 是目标检测、图像分类等任务中常用的评估模型性能的工具之一。它通过展示 精确率(Precision) 和 召回率(Recall) 之间的关系来帮助我们理解模型的表现。
WSL安装软件报错/sbin/ldconfig.real: /usr/lib/wsl/lib/libcuda.so.1 is not a symbolic link
WSL安装软件报错/sbin/ldconfig.real: /usr/lib/wsl/lib/libcuda.so.1 is not a symbolic link。