




- @oakchina
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
如果您已经在使用 depthai-ros,请升级到 v3.2.1,并告诉我们它在您的项目中的表现。您的反馈将帮助我们持续改进 ROS 集成,并为社区带来更多新功能。无论您是刚开始在 ROS 2 上使用 DepthAI,还是正在部署生产级机器人应用,文档都能满足您的所有需求。应用程序现在可以访问受支持 RVC4 设备的磁力计数据,实现更丰富的传感器融合和导航应用场景。基于RVC4的设备现在可以通过
为了解决这个问题, 我们的团队直接在 NVIDIA Isaac Sim中开发并实现了与我们相机组合的虚拟版本,如实地复制了真实地OAK设备的规格和行为。无论您是在开发自主移动机器人、工业自动化解决方案、仓库管理系统、无人机还是研究平台,OAK相机现在都可以轻松地直接集成到您的模拟工作流中。开发者则可以专注于更加重要的工作,例如:构建、测试和改进他们的机器人系统,而不是花时间重新创建传感器规格和验证

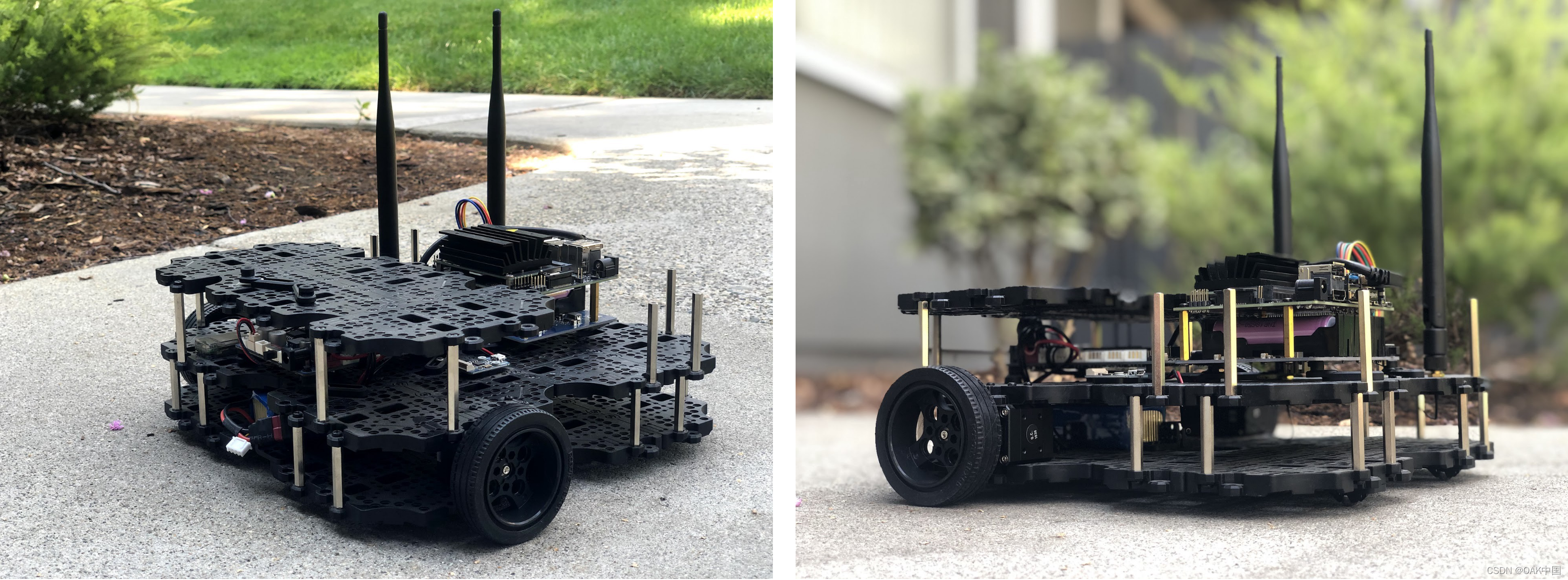
这个项目来自Deepak Talwar的团队,也是他们参加OpenCV Spatial AI大赛的决赛项目。
在 OAK-4 摄像头上运行你自己的 AI 模型,现在比以往任何时候都更加简单——只需借助。上传模型、将其转换为 RVC4 平台格式、通过提供的示例代码启动运行,从训练好的 ONNX 模型到边缘端实时推理,整个过程仅需几分钟。

自 2026 年 5 月起生产的设备,OAK 将不再为多款 PoE、FFC 及 SOM 系列产品配备板载 eMMC 存储。这一调整是基于客户使用率低、存储芯片成本上涨,以及 DepthAI v3 不再依赖 eMMC 等因素引起。若您的部署方案确实需要板载存储,请在订购前联系 OAKChina 技术支持团队。
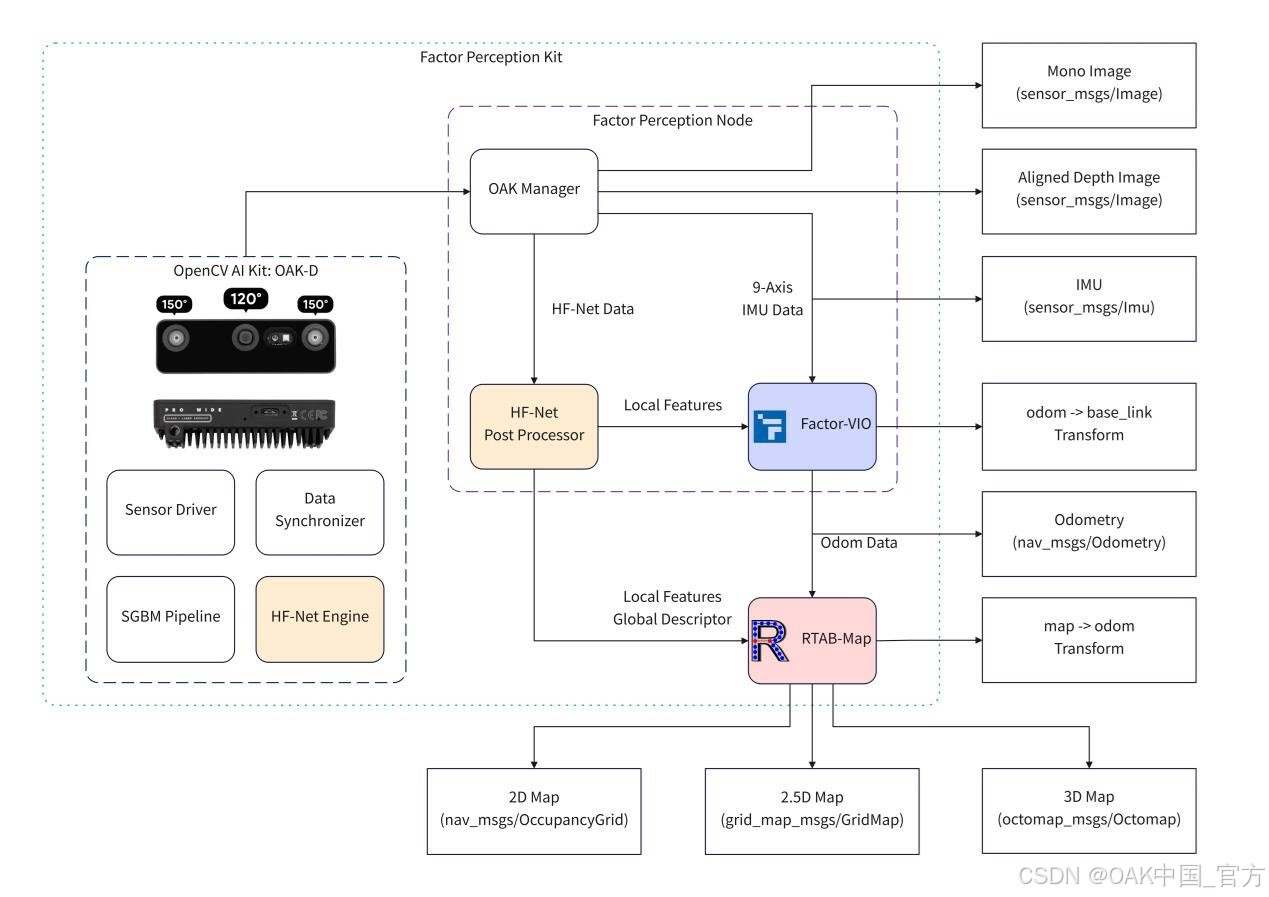
模型输出的数据服务于 SLAM 的前端和后端,从而实现基于深度学习的特征点检测与追踪,前端的 VIO 可以更精准地工作,后端则利用全局描述进行视觉地点识别(VPR),即使在超大场景中也能实现快速回环检测和重定位问题。提供2D、2.5D、3D地图,满足不同导航和避障需求,如AGV/AMR的2D地图,无人机的3D地图,以及人形机器人和机器狗的2.5D地图。隐私保护模式,Life-Long SLAM与分
机器人和空间智能系统常常面临恶劣的现实世界自然环境挑战,例如温度的变化和连续振动,这很容易导致立体深度校准随着时间产生偏移,为了解决这类问题,我们引入了。如果全分辨率不能满足您的输出要求,DepthAI现在会自动回退到裁剪的传感器配置。我们着重提升了部署的韧性,将前沿检测模型推向边缘端侧,并大幅度加速了设备端的神经网络的计算。深度感知是空间智能的核心,但传统的经典算法可能难以处理无纹理的表平面,例

OAK相机可以运行几乎所有的人工智能模型,包括用户自己创建和训练的神经网络模型。一个OAK芯片内部可以同时以并联或者串联的模式运行多个AI神经网络模型。我们可以通过在线或者离线的转换工具,将自己训练好的神经网络模型转换成可以在OAK上加速运行的BLOB格式的神经网络模型。这里提供YOLO模型的三种转换方法,其他框架的模型方法类似,示意图如下:YOLO各个版本的详细转换教程可查看此处。

在本次版本更新中,oakctl应用运行、OAK-Viewer连接,网络共享和OTA推送更新等功能暂不支持,但我们会在未来的开发中迭代推送。管道和数据流,传输结果,简化了开发设置,并使得对应用程序进行原型设计变得更加容易,仅通过一个单独的连接。在这篇文章中,我们将介绍此版本中引入的关键功能,演示您今天可以运行的示例管道,并展示如何在。流在您的环境中的性能,我们建议使用不同的管道配置运行基准测试。我们

在本次版本更新中,oakctl应用运行、OAK-Viewer连接,网络共享和OTA推送更新等功能暂不支持,但我们会在未来的开发中迭代推送。管道和数据流,传输结果,简化了开发设置,并使得对应用程序进行原型设计变得更加容易,仅通过一个单独的连接。在这篇文章中,我们将介绍此版本中引入的关键功能,演示您今天可以运行的示例管道,并展示如何在。流在您的环境中的性能,我们建议使用不同的管道配置运行基准测试。我们