




- @m0_73694897
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
windows电脑通过微信或者qq传图片很方便,但是ubuntu始终没有做到和微信和qq的无缝使用,传图片很是不方便,下面分享一种手机和linux电脑互传图片的方法:要求手机和ubuntu在同一个局域网。1 打开手机-->文件管理-->点击右上角三个点-->远程管理-->启动服务 可以设置成匿名,不嫌麻烦可以设个用户名和密码,启动服务 2 ubuntu电脑打开文件夹-->点击左下角其他位置-->输

2 找到下载的microsoft-edge-stable_114.0.1823.37-1_amd64.deb 安装包,在当前文件夹右键点击选择在终端打开,输入命令:sudo dpkg -i microsoft-edge-stable_114.0.1823.37-1_amd64.deb。在浏览器搜索linux安装edge浏览器,搜出的好多安装命令大都用不了,目前只能用下载安装包在安装的方式进行安装。
我们选最后一个磁盘,如果硬盘很大,用最后一个分区安装ubuntu,直接删除卷最简单,如果磁盘空间紧张,可以点压缩卷,一般ubuntu 20-40G空间就够用,压缩出40G空间待用。姓名计算机名 密码 尽量短 好记,因为经常要用到,对保密没有要求点上自动登陆,接着就是漫长的安装等待。右键点击磁盘0属性---卷 查看磁盘分区形式,记住是mbr 还是gpt(此处是一个坑,非常重要)3 插上制作好的ubu

opencv_contrib下载地址: https://github.com/opencv/opencv_contrib。解压上面下载的2个文件:opencv-4.4.0.zipopencv_contrib-4.4.0。没有删除干净在用下面的命令,干净了就不用了,下面命令劲有点大,会连同依赖给删除了。主文件夹内新建opencv文件夹,把上面解压的2个文件夹放入opencv内。OpenCV源码下载官
车架用40*40方管焊接而成,宽452毫米,长460毫米,车轮距517毫米(本人不是专业焊工,焊点有点粗糙)。36伏锂电,运控板选的RIKIBOT-FOC的大功率驱动板,主机板暂时用笔记本。2个6.5寸平衡车轮毂电机作轮子,和一个3寸万向轮。

能在室外强光下使用的镭神m10的安装效果

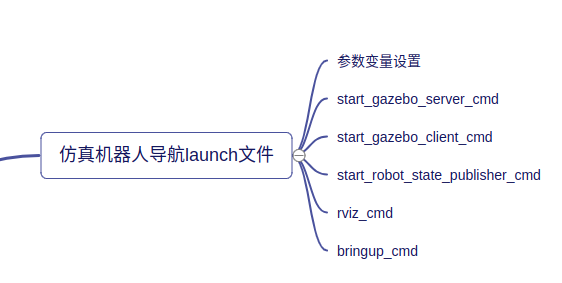
nav2导航launch文件经过了多层套娃,真的是让初学者哭晕在厕所,今天我们就拆解一下他的launch文件,还原他最简单的状态,看看他到底启动了什么节点。1 文件目录结构2 文件源代码。
深度相机性价比较高的要属奥比中光的Astra Pro,对标微软的D435,能采集彩色图像,深度图像,红外图像,如果只是做实验或者只是拿来玩玩,在咸鱼入手一个也就一二百,可玩性非常高。想拿他跑一下ORB_SLAM3,但是在ros2 foxy版用尽各种办法就是不能同时采集彩色图像和深度图像,下面记录一下在ros1采集彩色图像和深度图像的过程,看看能不能通过ros1_bridge把彩色和深度图像传到ro

联想t470win10 主机安装Ubuntu 18.04 20.04 22.04 3个不同系统的虚拟机,都打不开摄像头player 可移动设备,连接摄像头,不行usb兼容性改3.1改过了,不行win10主机任务管理器vmusbarbservice 正在运行 也解决不了,这三种是回答最多的方法,就是打不开,app打开就是个黑窗口。无意当中搜dev/video0 看到一条命令sudo apt-get