




- @m0_68732180
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
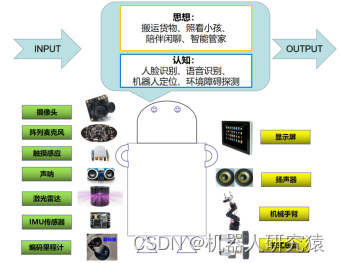
连载文章,长期更新,欢迎关注:机器人技术的本质可以用图6-24所示的模型来表示,模型中主要包括感知、决策和交互3个部分。机器人通过搭载的传感器对环境进行感知,即传感器是机器人系统的输入端;机器人通过搭载的执行机构与环境进行交互,即执行机构是机器人系统的输出端;决策作为机器人的中枢系统连接输入端和输出端。决策由低智能的认知层和高智能的逻辑推理层构成,常见的人脸识别、语音识别、机器人定位、机器人避障等

连载文章,长期更新,欢迎关注:轮式机器人底盘按照转向方式的不同,可以分为两轮差速模型、四轮差速模型、阿克曼模型、全向模型等。两轮差速模型、四轮差速模型、阿克曼模型也称为运动受约束模型,全向模型也称为运动不受约束模型。介绍到的这几种模型都是轮式底盘模型,除此之外还有其他一些底盘模型,比如双足底盘模型、四足底盘模型、六足底盘模型、多足与轮式复合底盘模型等,不过这些只需要了解即可,并不要求掌握。

由于最近要在OpenCV3中使用SIFT和SURF特征提取,而自从OpenCV2升级到OpenCV3版本后,SIFT、SURF等这些算法都被移出opencv默认项目库,而被放到叫opencv_contrib的项目库。因此需要手动下载opencv和opencv_contrib的源码,然后将两个源码放在一起手动编译安装。

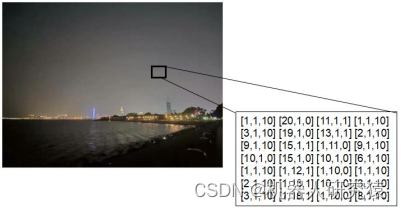
学习OpenCV的第一件事,就是要搞明白图像的存在形式。话不多说,从程序中具体讲解。本章C++示例代码将采用CMake方式编译,关于CMake编译的内容已经在第2章中讲解过了,不在重复。利用OpenCV可以从图片文件、视频文件和相机设备获取图像数据,下面结合例子分别对这三种方式进行讲解。关于新建C++工程和CMakeLists.txt编译配置文件的内容不再展开讲解,不熟悉的朋友可以回头参考第2章的
连载文章,长期更新,欢迎关注:不管是用贝叶斯网络还是因子图,一旦SLAM问题用概率图模型得到表示后,接下来就是利用可观测量(和)推理不可观测量(和),也就是说SLAM问题的求解过程是一个状态估计。在讲解7.4和7.5节具体状态估计方法之前,大家需要先对估计理论[3] p110~138有所了解。
推理、知识、神经网络、机器学习、决策理论等诸多的概念,本身就是在不同的层面不同的时期来讨论的,这些概念之间有些是互相重叠的、有些是发展递进的、有些是特例、有些是不同角度出发的同一观点等等。图10-33发展历程既然从理论上暂时无法得知智能的真正面貌,那么广大读者也就不必拘泥于理论层面的各种概念,仅从实践的角度讨论和学习主流的一些技术应用就已经够了。如图10-34所示,为人工智能技术应用的大致流程。从

连载文章,长期更新,欢迎关注:机器人是一个复杂的装置,涉及到执行机构、感知、决策等主要环节。机器人上的配备的常用执行机构有轮式运动底盘、机械手臂、音响和显示屏;机器人上的感知设备通常有激光雷达、声呐、摄像头、IMU、轮式里程计编码盘、麦克风、触摸感应;机器人的决策是机器人智能的体现,机器人通常借助感知装置持续跟外部环境进行交互,从而来获取机器人的状态和环境的状态,我们可以简单的把机器人获取自身状态
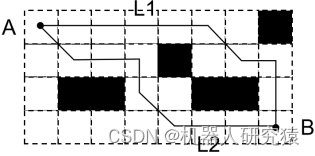
连载文章,长期更新,欢迎关注:上一章围绕“我在哪”、“我将到何处去”和“我该如何去”三大核心问题讨论了自主导航中的数学基础,并介绍了其中所涉及的环境感知、路径规划和运动控制这几个核心技术。不过依靠单独的一两个算法很难让机器人的自主导航运行起来,因为自主导航是一个理论性和工程性都很强的课题,往往一个自主导航系统包含多个核心算法实现以及必要的各种工程组件。
(先占个坑,有时间再来补充详细内容,大家可以直接看文后的参考文献)
连载文章,长期更新,欢迎关注:相机是机器人进行视觉感知的传感器,相当于机器人的眼睛。在机器人中,主要讨论三种类型的相机,即单目相机、双目相机和RGB-D相机,如图4-46所示。图4-46三种类型的相机。
