




- @m0_63007797
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
Google公司继MobileNetV2之后,在2019年发表了它的改进版本MobileNetV3。而MobileNetV3共有两个版本,分别是MobileNetV3-Large和MobileNetV2-Small。改进后的MobileNetV3,在ImageNet数据集的分类精度上,它的MobileNetV3-Large版本相较于MobileNetV2提升了大概3.2%的精度同时延迟减少了20%

1。卷积输出特征图的尺寸计算方法如下(卷积核的高和宽分别为kh和kwk_h和k_wkh和kw):HoutH−kh1WoutW−kw1HoutH−kh1WoutW−kw12。当宽和高的步幅分别为sh和sws_h和s_wsh和swHoutH2ph−khsh1WoutW2pw−kwsw1Houts。
本文评测了openGauss 7.0数据库的AI与向量特性。技术方面,DataVec插件提供向量存储和检索功能,支持多种距离计算方式;AI4DB实现智能运维,DB4AI内置机器学习算法。生态建设上,社区规模快速扩张,兼容MySQL协议并支持多种硬件。实测通过Docker安装后,使用Python实现RAG系统验证其向量检索性能。结果显示openGauss在AI融合与向量处理方面表现突出,适合RAG等

关系代数是一种抽象的查询语言,是关系数据操纵语言的一种传统表达方式,它是利用对关系的运算来表达查询的。任何运算都是将一定的运算符作用于一定的运算对象上,得到预期的运算结果。关系代数的运算对象是关系,运算结果亦为关系。集合运算符将关系看成元组的集合从关系的“水平”方向即行的角度来进行运算专门的关系运算符不仅涉及行而且涉及列算术比较符辅助专门的关系运算符进行操作逻辑运算符辅助专门的关系运算符进行操作。

云计算发展迅速,移动云作为业界领先的云服务商,一直致力于推动云计算技术的创新应用,赋能各领域的开发者,构建蓬勃发展的云生态。“移动云”是基于5g技术,由中国移动打造的品牌,针对云计算、大数据、人工智能等产品的服务,为客户提供专业的解决方案。基于互联网和虚拟化技术,将计算、存储、网络等资源以服务的形式提供给用户。用户可以根据需要获取和使用这些资源,而无需购买和维护硬件设备。通过云计算技术实现资源的动

华为ModelEngine Nexent低代码平台推出单智能体数据分析解决方案,通过Docker一键部署实现快速安装。该方案支持配置大语言模型、向量模型和视觉语言模型,并集成本地文件操作工具和网络搜索功能。通过接入魔搭社区的MCP服务,可实现对数据的智能分析和可视化展示。整个流程无需复杂编程,从数据接入到图表输出实现全自动化,有效降低技术门槛,帮助用户快速将原始数据转化为决策依据。该平台特别适合缺
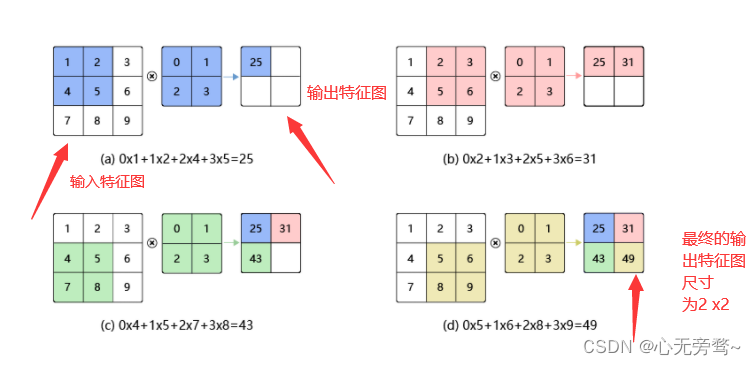
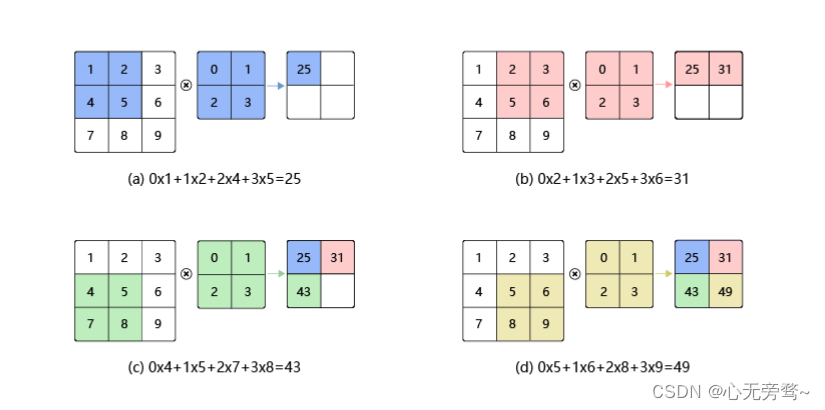
卷积是数学分析中的一种积分变换的方法,在图像处理中采用的是卷积的离散形式。这里需要说明的是,在卷积神经网络中,卷积层的实现方式实际上是数学中定义的,与数学分析中的卷积定义有所不同,这里跟其他框架和卷积神经网络的教程保持一致,都使用互相关运算作为卷积的定义,具体的计算过程如所示。
在 ROS 2 机器人控制系统中,框架扮演着核心角色。而spawner(控制器启动器)则是实现控制器自动化加载和启动的关键工具。本文将详细解析spawner的工作原理,对比手动服务调用与自动化启动的优劣,并基于实际的 OpenArm 双臂机器人调试经验,总结出在使用spawner启动资源密集型控制器时的最佳工程实践,以确保系统在性能受限的硬件上也能稳定运行。特性原始官方 Spawner (风险)修
今天使用Xception轻量级网络实现一个简单的猫狗识别。

LeRobot Dataset v3.0 是 Hugging Face 推出的标准化机器人学习数据格式,提供统一的多模态时序数据访问接口,支持感官运动信号、多摄像头视频,以及丰富的元数据用于索引、搜索和可视化。版本信息: v3.0(包含在 lerobot >= 0.4.0 中)文件组织: v3.0使用文件基础而非episode基础的存储元数据驱动: Episode边界通过元数据而非文件名解析高效访