
写文章




- @m0_56312629
简介
该用户还未填写简介
擅长的技术栈
未填写擅长的技术栈
可提供的服务
暂无可提供的服务
C++中的数组(array)
3.1 数组(array)

基于opencv-Python小车循线学习笔记
基于opencv-Python小车循线学习笔记,pid加入摄像头模块,让小车实现自动循迹行驶思路为:摄像头读取图像,进行二值化,将白色的赛道凸显出来选择下方的一行像素,黑色为0,白色为255找到白色值的中点目标中点与标准中点(320)进行比较得出偏移量根据偏移量,采用PID控制器来控制小车左右轮的转速# coding:utf-8import RPi.GPIO as gpioimport timei
Linux下载工具XDM下载安装与使用
Linux下载工具XDM下载与使用

使用Xshell连接VMware虚拟机中的ubuntu
使用Xshell连接VMware虚拟机中的ubuntu
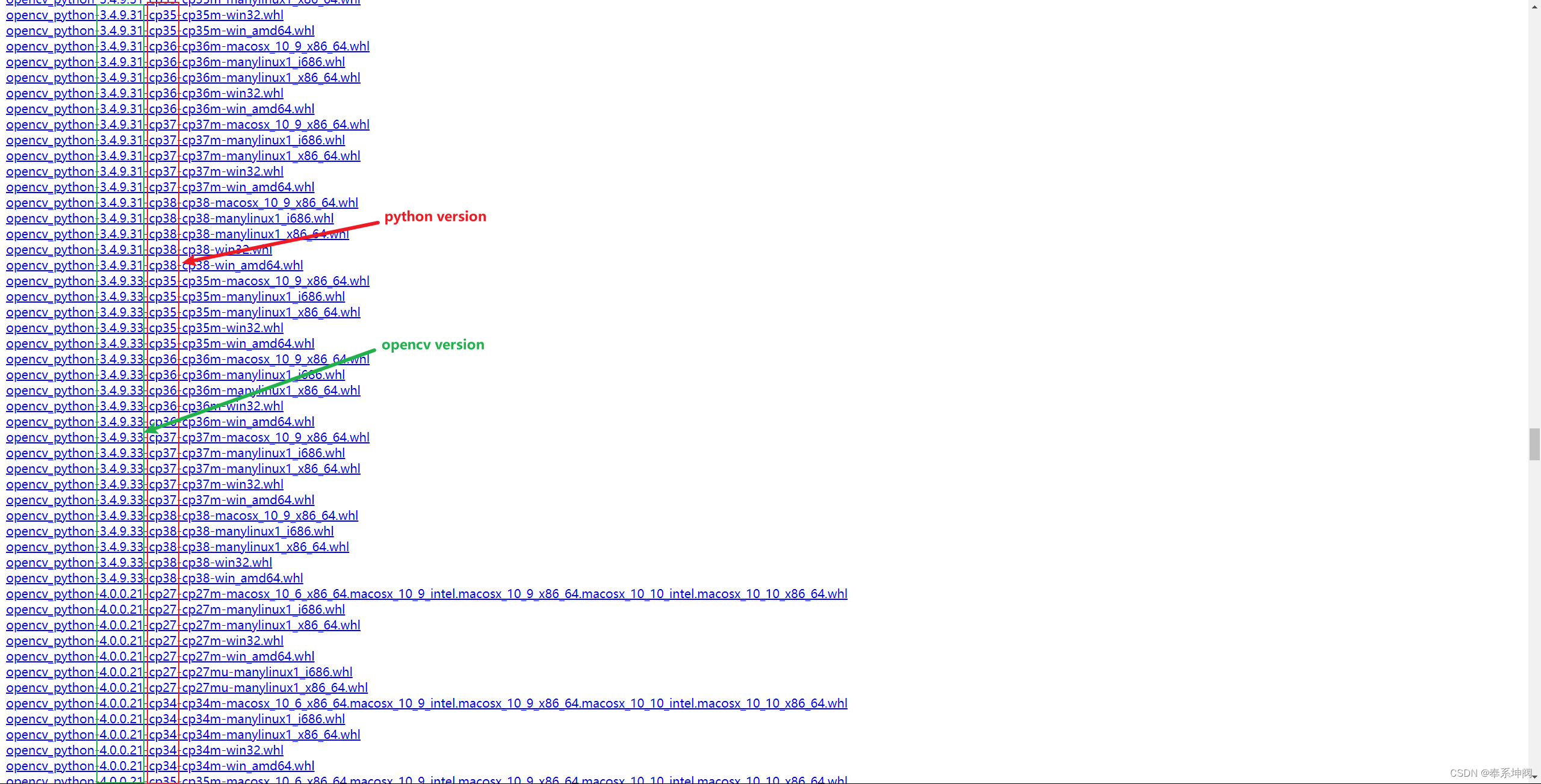
Python版本与opencv版本的对应关系
Python版本与opencv版本的对应关系
pycocotools:ERROR: Could not build wheels for pycocotools, which is required to install pyproject...
ERROR:Could not build wheels for pycocotools which use PEP 517 and cannot be install 和ERROR:Could not build wheels for pycocotools, which is required to install pyproject.toml-based。

到底了