
写文章




- @m0_51675440
简介
该用户还未填写简介
擅长的技术栈
未填写擅长的技术栈
可提供的服务
暂无可提供的服务
我在嵌入式控制上对PID算法的理解
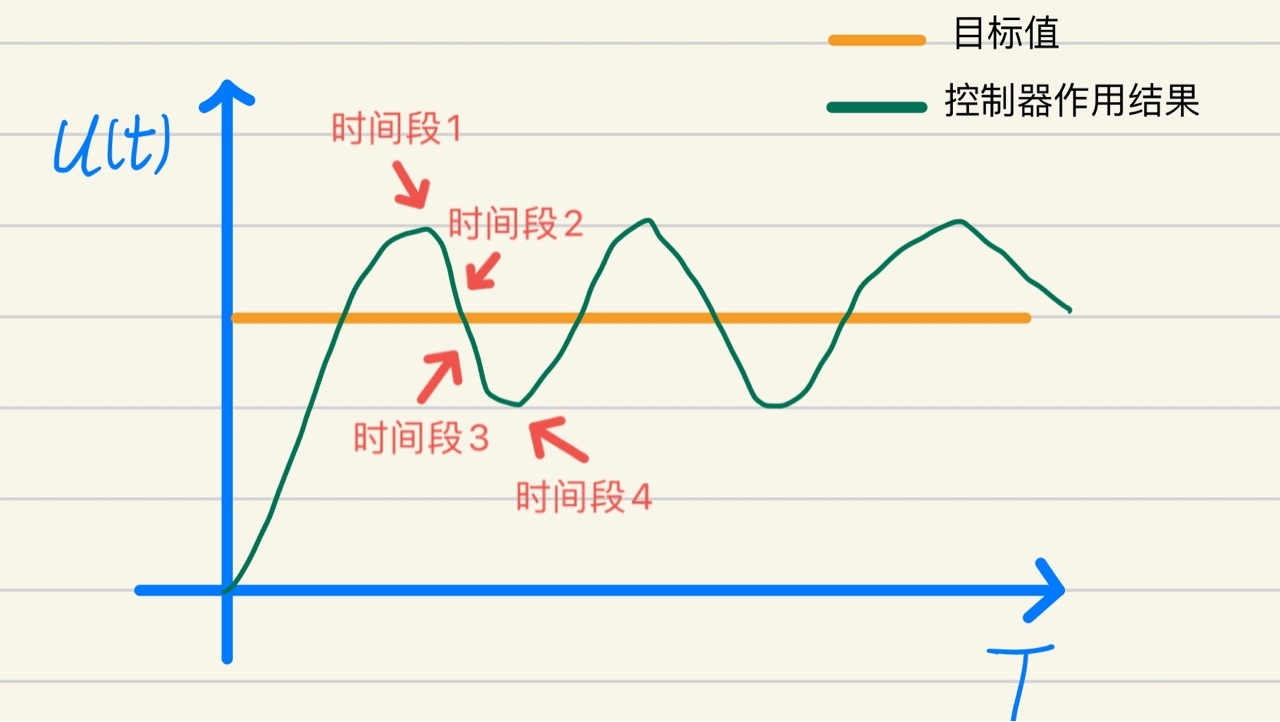
本文较长,目前为1.0.0版本,后续将会根据理解变化不断修改。———始———理论上连续系统的 PID公式为式中,Kp——比例增益;Tt——积分时间常数;TD——微分时间常数;u(t)——PID控制器的输出信号;e(t)——给定值与测量值之差。式子很明显的展示了输出信号的计算公式,我们由此可知我们常用的Ki和Kd分别是Kp除以积分时间常数和Kp乘微分时间常数,所以Ki和Kd是与Kp有关的(ps :
我在嵌入式控制上对PID算法的理解
本文较长,目前为1.0.0版本,后续将会根据理解变化不断修改。———始———理论上连续系统的 PID公式为式中,Kp——比例增益;Tt——积分时间常数;TD——微分时间常数;u(t)——PID控制器的输出信号;e(t)——给定值与测量值之差。式子很明显的展示了输出信号的计算公式,我们由此可知我们常用的Ki和Kd分别是Kp除以积分时间常数和Kp乘微分时间常数,所以Ki和Kd是与Kp有关的(ps :
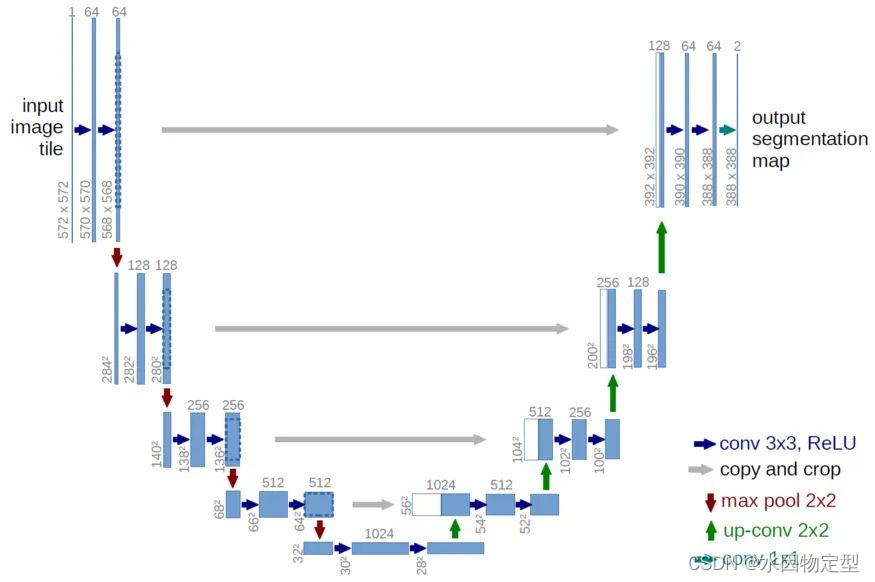
keras搭建Unet实现图像分割
个人经验的Unet原理讲解及使用keras实现,附代码和数据集。
教你使用python搭建QQ机器人
教你快速搭建你自己的QQ机器人,可以实现聊天,发图,语音,查询天气等功能。甚至不需要编程。

教你使用python搭建QQ机器人
教你快速搭建你自己的QQ机器人,可以实现聊天,发图,语音,查询天气等功能。甚至不需要编程。
到底了