
写文章




- @luoyihao123456
简介
该用户还未填写简介
擅长的技术栈
未填写擅长的技术栈
可提供的服务
暂无可提供的服务
学习slam过程中一些小问题的总结
学习slam过程中的一些基本配置
视觉slam基础知识
视觉slam基础知识
基于EKF的IMU和轮速计融合方法
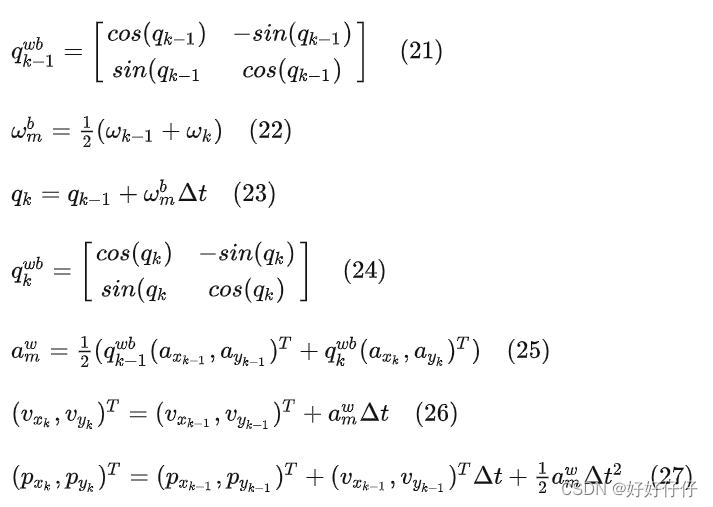
自动泊车APA需要短程高精度的定位,受限于平台算力,找到一种基于EKF的IMU和轮速计融合方法。2、将加速度的零偏作为待估计量,不必时刻update,等脉冲发生变化后再进行update。因为后续项目中采用了基于标定的方法,该方案暂时搁置,待有空后再进行新的尝试。1、不再使用轮速,改用轮速脉冲和标定准确的轮胎直径。待估计量:横摆角、加速度、速度和位置。观测值:速度、相邻两帧的角度差、距离。求解雅可比
ORB_SLAM2新增稠密建图代码笔记
ORB_SLAM2新增稠密建图代码笔记
到底了