




- @lsh670660992
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
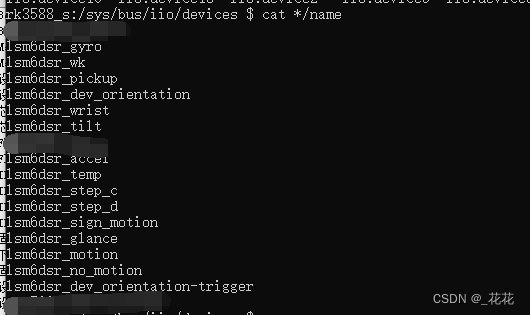
RK3588主板搭载Android12操作系统,内核是Linux5.10,使用ST的六轴传感器LSM6DSR芯片。LSM6DSR是一款加速度和角速度(陀螺仪)六轴传感器,还内置了一个温度传感器。该芯片可以选择I2C,SPI通讯,还有可编程终端,可以后置摄像头等设备,功能是很强大的(感兴趣的可以去看数据手册)。该芯片原厂公开了input和iio两种驱动,我这边选用的是iio驱动。
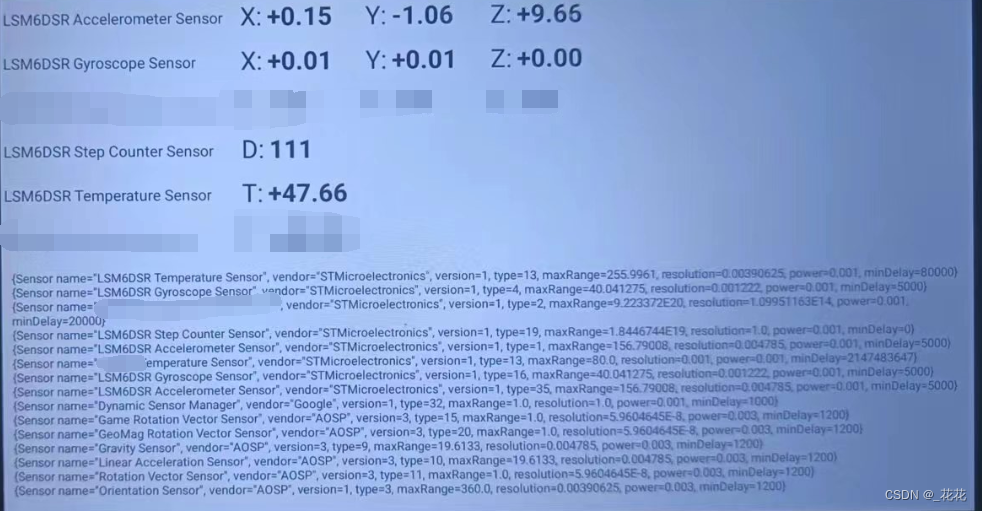
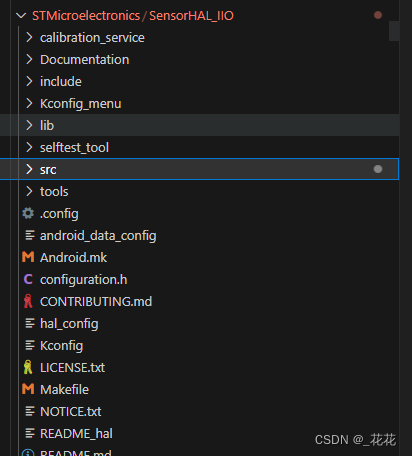
RK3588主板搭载Android12操作系统,内核是Linux5.10,使用ST的六轴传感器LSM6DSR芯片。LSM6DSR是一款加速度和角速度(陀螺仪)六轴传感器,还内置了一个温度传感器。该芯片可以选择I2C,SPI通讯,还有可编程终端,可以后置摄像头等设备,功能是很强大的(感兴趣的可以去看数据手册)。该芯片原厂公开了input和iio两种驱动和HAL,我这边选用的是iio驱动,所以HAL也
RK3588主板搭载Android12操作系统,内核是Linux5.10,使用ST的六轴传感器LSM6DSR芯片。LSM6DSR是一款加速度和角速度(陀螺仪)六轴传感器,还内置了一个温度传感器。该芯片可以选择I2C,SPI通讯,还有可编程终端,可以后置摄像头等设备,功能是很强大的(感兴趣的可以去看数据手册)。该芯片原厂公开了input和iio两种驱动,我这边选用的是iio驱动。
云迹机器人底盘调用还是比较友好的,就是纯socket收发指令就能实现,今天实现一个底盘移动到指定点位功能。底盘的默认IP是192.168.10.10通讯端口是31001,测试机与底盘接入统一网络后直接发指令即可。本文给出两种语言调用源码,选择一种使用即可。JAVA调用源码:(需要下载org.json-20161124.jar)
Digital RootsTime Limit: 2000/1000 MS (Java/Others) Memory Limit: 65536/32768 K (Java/Others)Total Submission(s): 38824 Accepted Submission(s): 11925Problem DescriptionThe digital ro
数塔Time Limit: 1000/1000 MS (Java/Others) Memory Limit: 32768/32768 K (Java/Others)Total Submission(s): 15753 Accepted Submission(s): 9399Problem Description在讲述DP算法的时候,一个经典的例子就是数塔问题,它
Tempter of the BoneTime Limit: 2000/1000 MS (Java/Others) Memory Limit: 65536/32768 K (Java/Others)Total Submission(s): 51836 Accepted Submission(s): 13942Problem DescriptionThe dogg
1510: ZZ love CookiesTime Limit: 1 Sec Memory Limit:64 MBSubmit: 228 Solved: 139SubmitStatusWeb BoardDescription One day, ZZ came to visit her friend LL and DD and saw that
ST传感器芯片HAL按官方文档移植后,测试一直掉不起来,加的日志没出来。经过分析,是系统自带了一个HAL,影响的。

贫瘠的C语言啊,这样开线程,可以跑,但是用完不会回收,就那样僵死在那里,资源占用着。等线程表满了,再新建线程,就直接撂挑子返回11了。pthread新手坑,跟着网上直接写,pthread_create然后就让函数跑,跑完了直接在函数里面return。这个流程,小测试,一点毛病都没有,跑得贼溜。然后在pthread_create后面增加了pthread_detach调用,测试就不一样了,线程数量级再
