




- @laukal
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
PyTorch是一个开源的深度学习框架,其动态图的特性非常适合快速实验和模型原型设计。在计算机视觉任务中,如图像分类、目标检测、图像分割等,PyTorch提供了丰富的API和预训练模型,帮助开发者快速搭建和优化模型。当标准数据集不能满足特定需求时,创建自定义数据集变得尤为重要。1. 数据集结构首先,您需要按照一定的结构组织您的数据。一般建议为每个类别创建单独的文件夹,文件夹内存放对应类别的图片。2

低光照图像增强(LLIE)对于许多计算机视觉任务至关重要,包括目标检测、跟踪、分割和场景理解。尽管已有大量研究致力于提高在低光照条件下捕捉的低质量图像,但在自动驾驶车辆中,清晰的视觉仍然至关重要,尤其是在低光场景中,这表明这一领域需要持续研究。然而,用于LLIE的成对数据集十分稀缺,尤其是在街景领域,这限制了鲁棒LLIE方法的发展。尽管当前的LLIE方法使用了先进的transformer和/或基于
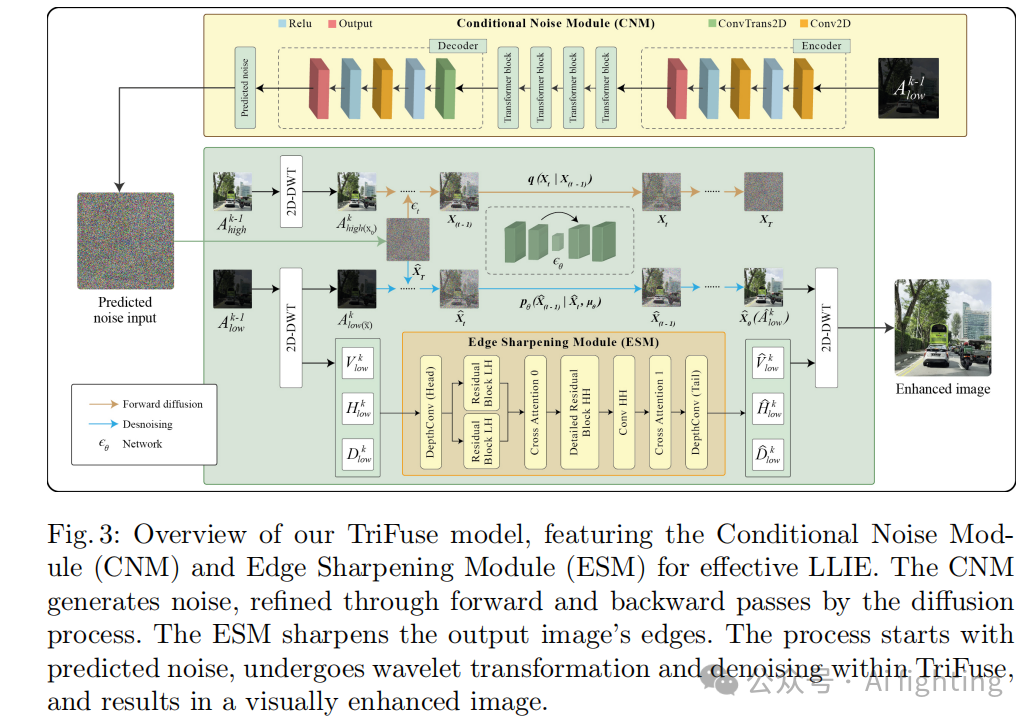
低光照图像增强(LLIE)对于许多计算机视觉任务至关重要,包括目标检测、跟踪、分割和场景理解。尽管已有大量研究致力于提高在低光照条件下捕捉的低质量图像,但在自动驾驶车辆中,清晰的视觉仍然至关重要,尤其是在低光场景中,这表明这一领域需要持续研究。然而,用于LLIE的成对数据集十分稀缺,尤其是在街景领域,这限制了鲁棒LLIE方法的发展。尽管当前的LLIE方法使用了先进的transformer和/或基于
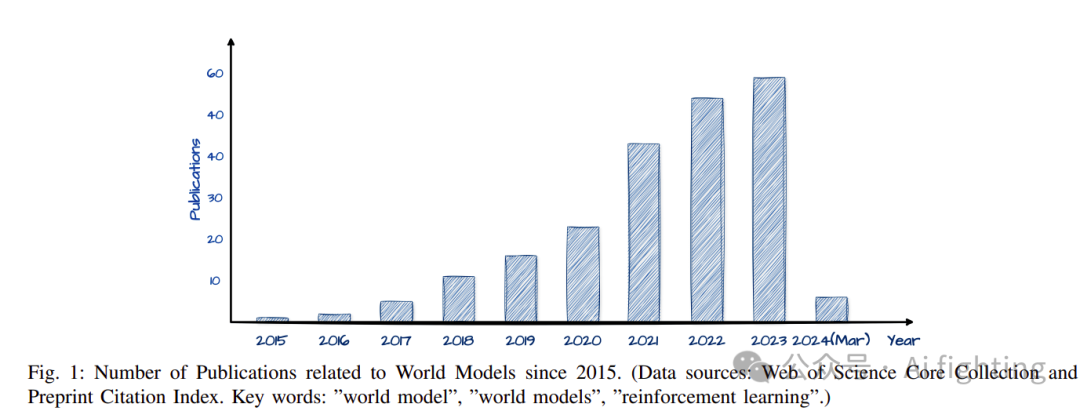
自动驾驶系统的开发是一个技术与哲学的双重挑战,核心在于模拟人类的直觉推理和常识。尽管机器学习在模式识别上取得了进展,但在复杂情境下仍存在局限。人类决策基于感官感知,但能预见行动结果和预判变化,这是机器难以复制的。世界模型是解决这一差距的关键,它模仿人类的感知和决策,使系统能预测和适应环境。这一概念从70年代的控制理论发展而来,与模型预测控制(MPC)紧密相关,并受到心理模型理论的支持。神经网络的发
随着人工智能技术的不断发展,越来越多的企业和个人开始关注如何利用AI技术提升用户体验和交互效果。本文将介绍如何使用抖音的扣子(Douyin Button)配置自己的AI Agent,搭载kimi, 实现智能互动,提升用户体验。由月之暗面科技有限公司(Moonshot AI)开发的人工智能助手。诞生于2023年10月10日,擅长中英文对话,拥有强大的语言理解和生成能力。能够处理长文本,支持多轮对话,

在当今这个快速发展的AI时代,抖音推出了一个名为“扣子Coze”的工具,帮助用户快速、低门槛地搭建属于自己的AI机器人。本文将详细介绍如何使用扣子Coze配置自己的AI Agent,并展示其在多个平台上的应用。通过巧妙地利用“扣子”这样的API和框架,我们可以高效地搭建和管理多Agent系统,实现从基础自动化到高级智能化的跨越。无论是提升客户服务体验、优化业务流程,还是处理大规模数据,多Agent

随着人工智能技术的不断发展,越来越多的企业和个人开始关注如何利用AI技术提升用户体验和交互效果。本文将介绍如何使用抖音的扣子(Douyin Button)配置自己的AI Agent,搭载kimi, 实现智能互动,提升用户体验。由月之暗面科技有限公司(Moonshot AI)开发的人工智能助手。诞生于2023年10月10日,擅长中英文对话,拥有强大的语言理解和生成能力。能够处理长文本,支持多轮对话,
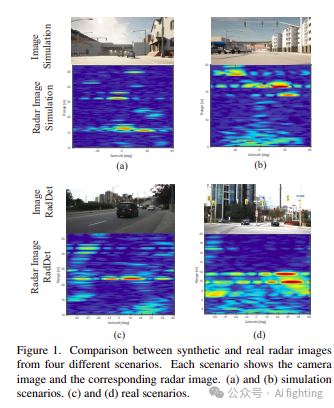
在雷达影像中的物体检测,借助神经网络展现了极大的潜力,能够提升自动驾驶。然而,从真实雷达图像中获取标注数据集以训练这些网络极具挑战性,特别是在长距离检测以及恶劣天气和光照条件下,雷达表现优越。为了应对这一挑战,我们推出了RadSimReal,一种创新的物理雷达模拟技术,能够生成各种雷达类型和环境条件下的合成雷达图像及其标注数据,无需收集真实数据。
随着人工智能技术的不断发展,越来越多的企业和个人开始关注如何利用AI技术提升用户体验和交互效果。本文将介绍如何使用抖音的扣子(Douyin Button)配置自己的AI Agent,搭载kimi, 实现智能互动,提升用户体验。由月之暗面科技有限公司(Moonshot AI)开发的人工智能助手。诞生于2023年10月10日,擅长中英文对话,拥有强大的语言理解和生成能力。能够处理长文本,支持多轮对话,
在三维视觉技术蓬勃发展的今天,点云作为捕获和表示三维环境的基础数据形式,扮演着至关重要的角色。点云融合拼接技术,作为连接孤立点云片段、构建连续、全面三维场景的核心过程,对于自动驾驶、机器人导航、三维建模以及地理信息系统等领域具有重要意义。在自动实际应用中,为了获得一个的360度的三维点云,我们可能会安装主雷达加补盲雷达,在不同的视点进行数据采集,然后将这些采集到的点云数据拼接到一起。2、将标定参数
