- @laoxue123456
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
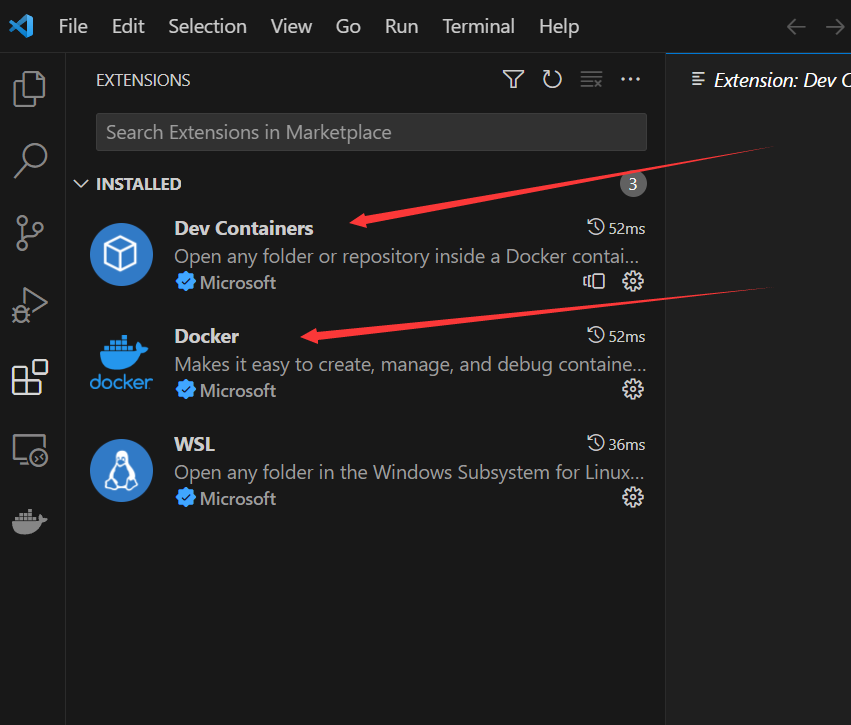
通过使用智能化的工作流控制系统来精确操控机械臂,不仅能够基于预设算法可靠地规划每个动作步骤的执行顺序和力度,确保作业流程的标准化和可重复性,还能通过模块化的程序设计思路灵活地在原有工作流中插入新的控制节点,这种可扩展的架构设计使得系统能够在不影响既有功能稳定性的前提下,便捷地集成诸如视觉识别、力反馈调节或协同作业等进阶功能模块,从而持续提升机械臂在复杂工业场景中的适应性和多功能性。这里我增加了De

通过使用智能化的工作流控制系统来精确操控机械臂,不仅能够基于预设算法可靠地规划每个动作步骤的执行顺序和力度,确保作业流程的标准化和可重复性,还能通过模块化的程序设计思路灵活地在原有工作流中插入新的控制节点,这种可扩展的架构设计使得系统能够在不影响既有功能稳定性的前提下,便捷地集成诸如视觉识别、力反馈调节或协同作业等进阶功能模块,从而持续提升机械臂在复杂工业场景中的适应性和多功能性。这里我增加了De
想系统学习ROS,做一些机器人开发。因为有些基础了,这里随便写写记录一下。
jupyter编辑器对于测试简单代码即好用也能快速生成pdf文档,无疑是个好东西。通过pip一条命令即可安装。CMD控制台一条命令启动jupyter编辑器。目录安装启动文件格式关联安装pip install jupyter启动jupyter notebook文件格式关联安装好后,jupyter notebook不会关联其创建的文件格式ipynb格式。这对于程序猿来说是无法忍受的,因此,我们还是忍受
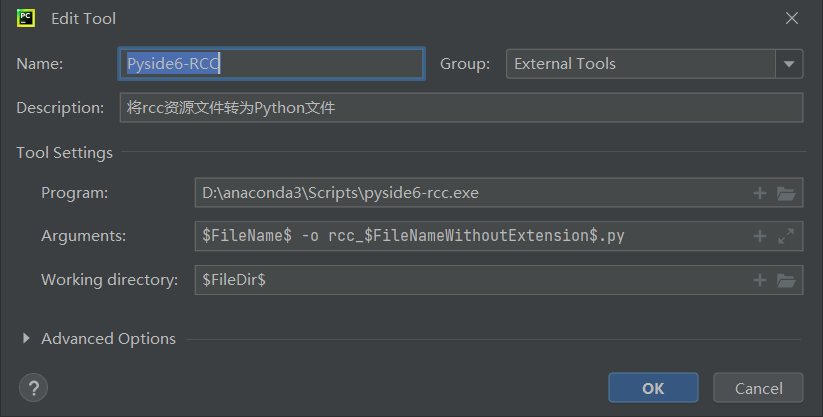
Pyside6这个UI框架的好处就不用说了,懂的都懂😜。我想用Pycharm作为代码编辑器,有一些Pyside6的工具需要利用利用,因此将其嵌入到Pycharm。
Anaconda提供了在单机上执行Python / R数据科学和机器学习的最简单方法。有了anaconda帮助管理各种项目运行所需要的环境,就不用担心电脑上的python环境错综复杂带来的抓狂了。用conda create --name my_virtual_name python=3.8创建虚拟环境时,出现以下报错C:\Users\XSF>conda create --name m

在Qt的安装目录下,可以看到Qt自带的更新工具。它可以帮助我们增删组件,如添加不同版本的编译环境、QtCreator等,非常方便。
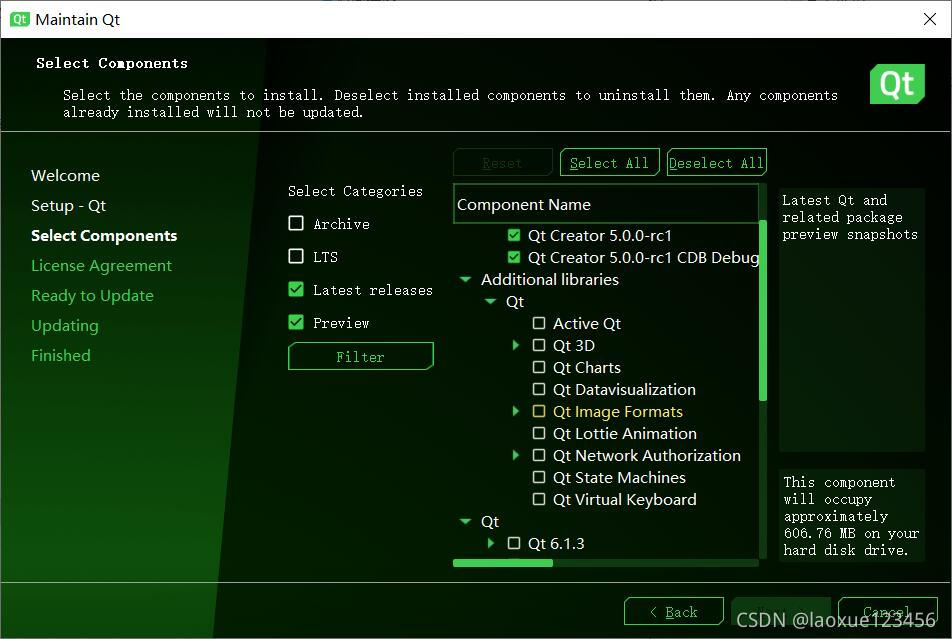
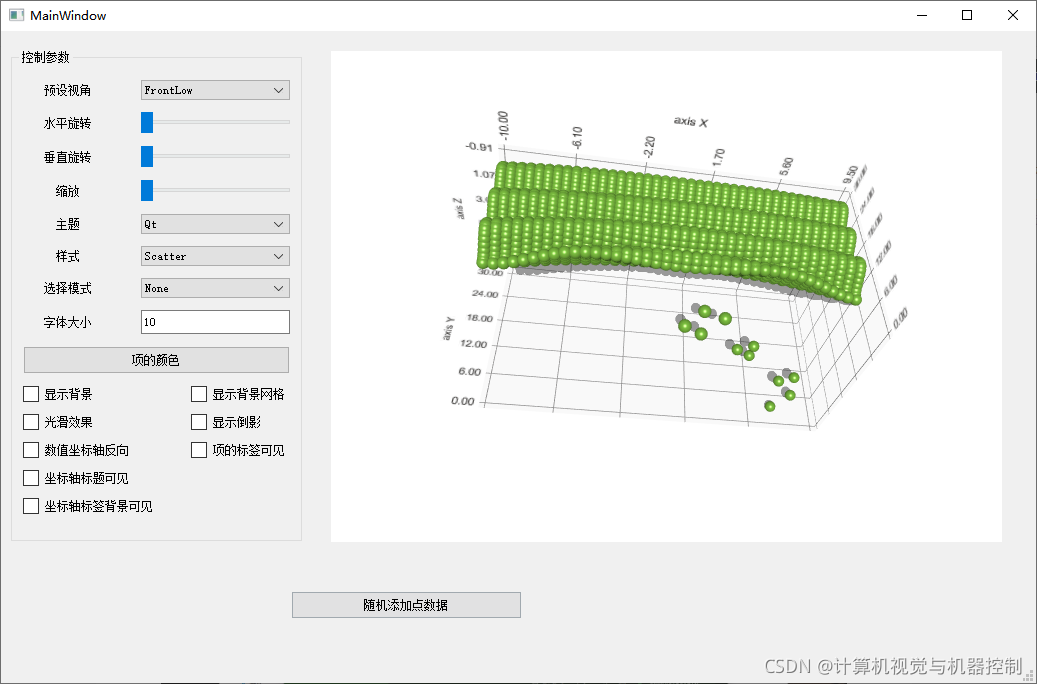
有时候我们的数据要用三维坐标显示配置安装Qt的三维坐标要用到DataVisualization模块,需要用QtMaintenanceTool安装这个模块。工程创建
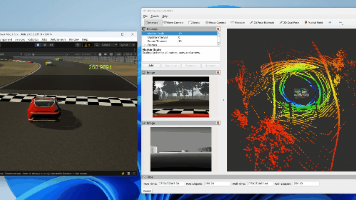
本项目介绍一种基于Unity3D引擎的SLAM多传感器仿真平台,可模拟 IMU、RGB-D相机、激光雷达传感器数据输出,为SLAM算法提供低成本、高可控性、可复现的仿真测试环境。
最近入门深度强化学习,需要用Pycharm运行深度强化学习的经典案例FlappyBird,奈何高高兴兴安装好Pycharm(安装方法在本博客里),并且从GitHub下载好代码后,项目运行不了。搞了一会儿,感觉这个比较有用,记录分享一下。FlappyBird源码下载下载网址https://github.com/ZLkanyo009/flappy-bird-tensorflow2-DQNhttps:/