
写文章




- @l961983207
简介
该用户还未填写简介
擅长的技术栈
未填写擅长的技术栈
可提供的服务
暂无可提供的服务
【python】scikit-learn包:模型评估与优化
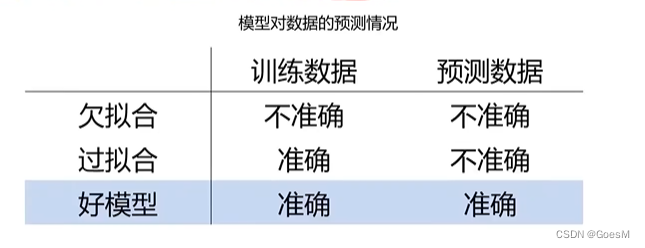
由模型构建目的 => 我们要想评估模型,我们在具有“训练数据”的同时,还需要“新数据”,并且知道“新数据”的正确结果=> 所以我们需要将我们已有数据进行分离,训练集测试集训练集用于模型训练,测试集用于预测训练集和测试集的比例可以不断调整混淆矩阵又叫误差矩阵,用来衡量分类算法的准确程度混淆矩阵的评估要素混淆矩阵可以提供更加全面的评估信息可以将混淆矩阵所包含的各种率都进行观察,即可得知该模型的具体情况
【python】pytorch包(第四章)手写数字图像识别
给定手写字体的图片,人工智能自动判断这是数字几。

【python】keras包:深度学习( CNN卷积神经网络 convolution nulear network)
python中的VGG包,主要用于抓取图片特征;一般借助VGG算法抓取特征后,通过MLP算法进行训练和预测。

【ROS软件】ROS2-humble安装navigation2与使用
安装gazebosudo apt install ros-humble-gazebo-*测试gazebo:ros2 launch gazebo_ros gazebo.launch.py启动nav2:使用nav2首先,通过按键画一个初始节点的大概位置然后,通过按键选择一个目标,则开始运行step 1. 进入工作环境step 2. 下载Nav2项目的对应版本在工作环境中运行指令:
【论文相关】IEEE各期刊/会议 投稿准备——检索投稿要求、准备CoverLetter(待完善)
外文期刊/会议网站的真的很难找,想要了解的信息很难检索;比如 旗下子期刊官网、子期刊具体要求不同等问题。

到底了