- @jeffliu123
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
公司的基本面因素一直具备滞后性,令基本面的量化出现巨大困难。而从上市公司的基本面因素来看,一般只有每个季度的公布期才会有财务指标的更新,而这种财务指标的滞后性对股票表现是否有影响呢?如何去规避基本面滞后产生的风险呢?下面我们将重点介绍量化交易在公司基本面分析上的应用,即平时常说的。

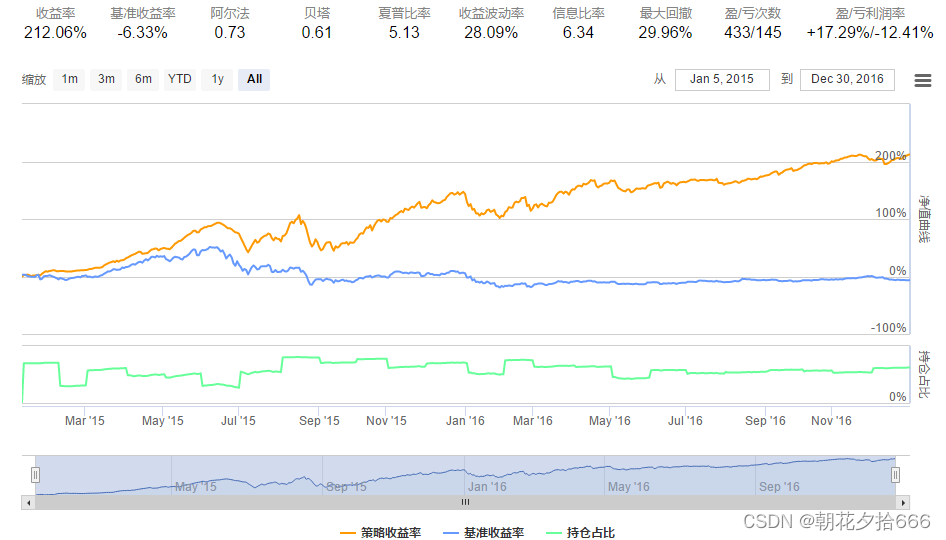
在平台上可以快速开发股票传统策略和股票AI策略,今天拿市值因子来练手,看看两个策略在2015-01-01到2016-12-31这两年时间各自的收益风险情形。市值因子是国内股票市场能够带来超额收益的alpha因子,已经被验证为长期有效的因子,也是广大私募基金常用的因子之一,传统的选股策略的股票组合大多在市值因子上有很大的风险暴露。。。AI市值策略是通过策略生成器构建策略,采用StockRanker排
本文基于点云的物体检测的最相关类别有一个总览;它们在各自的数据表示、特征提取和检测网络的体系结构方面有所不同。了解一种可用的探测器是如何工作的,通过将激光雷达点云转换为鸟瞰视角,然后将强度、高度和点密度输入卷积神经网络来寻找车辆。最后,是如何使用召回率和精度来评估目标检测器的性能。
通过本文内容,熟悉激光雷达传感器技术,理解飞行时间(time-of-flight )原理,并了解其他技术,如FMCW或OPA系统。此外,了解了如何从Waymo帧中提取范围图像,如何将范围和强度数据可视化,并将其转换为3d点云。
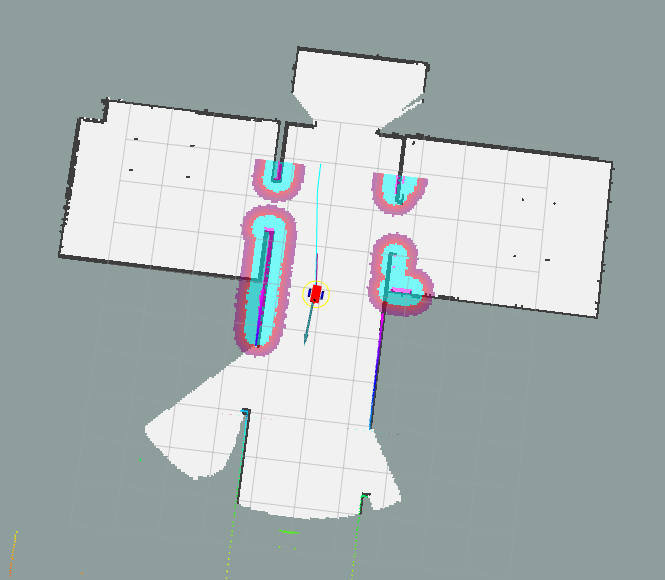
欢迎来到“Where Am I(我在哪里)?”定位项目!在这个项目中,将学习如何利用ROS AMCL包在Gazebo模拟环境的地图中准确地定位移动机器人。在完成本项目的过程中,涉及机器人软件工程的几个方面,重点是ROS:创建ROS包,在自定义Gazebo世界中,启动自定义机器人模型使用ROS AMCL包,远程操作或导航来定位机器人探索、添加和调优对应于每个包的特定参数,以实现最佳的定位结果
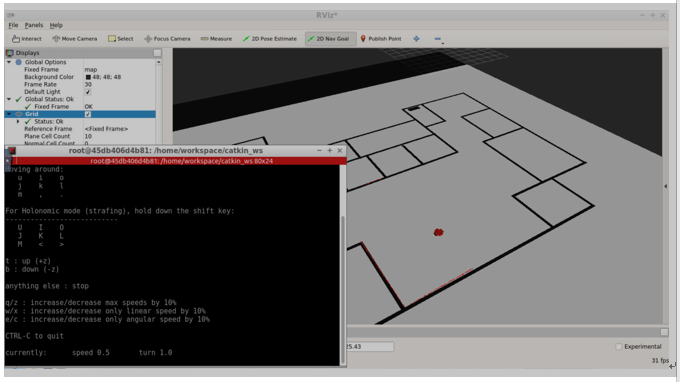
这个项目的下一个任务是选择两个不同的目标,根据目标确定方向,以测试机器人达到的能力。我们将这些目标称为取货区和卸货区区域。该部分仅用于测试目的,以确保机器人能够在自主命令它向这些位置移动之前,可到达这些位置。我们将使用ROS导航堆栈,它基于Dijkstra's-统一代价搜索算法(Uniform Cost Search algorithm)的一种变体,来规划机器人从起点到目标位置的轨迹。ROS导航堆