- @ifqhzJwse
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
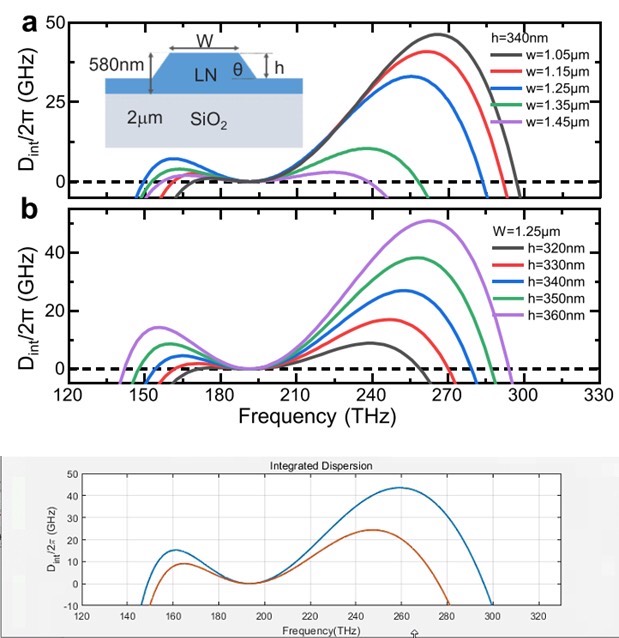
Lumerical Mode联合Matlab计算铌酸锂微环的Integrated Dispersion,可用于分析其在超连续谱、光频梳方面的高阶色散在光电子领域,铌酸锂微环因其独特的光学特性,在超连续谱和光频梳等前沿应用中展现出巨大潜力。而深入理解其色散特性,尤其是高阶色散,对于优化这些应用至关重要。今天咱们就来讲讲如何借助 Lumerical Mode 和 Matlab 联合计算铌酸锂微环的 I
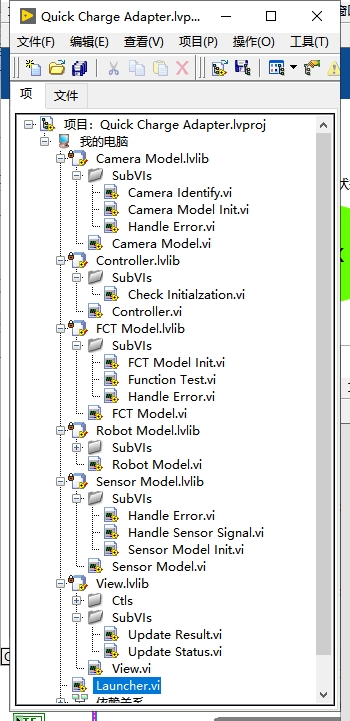
AMC多线程框架,模块化设计,显示,采集机器人,测试,相机,主控分离设计框架。LabVIEW源吗。版本是LabVIEW2017 VIPM插件AMCDMC GUI最近在研究基于LabVIEW 2017的机器人项目,其中用到了AMC多线程框架以及一些很有意思的设计理念,今天就来和大家分享分享。
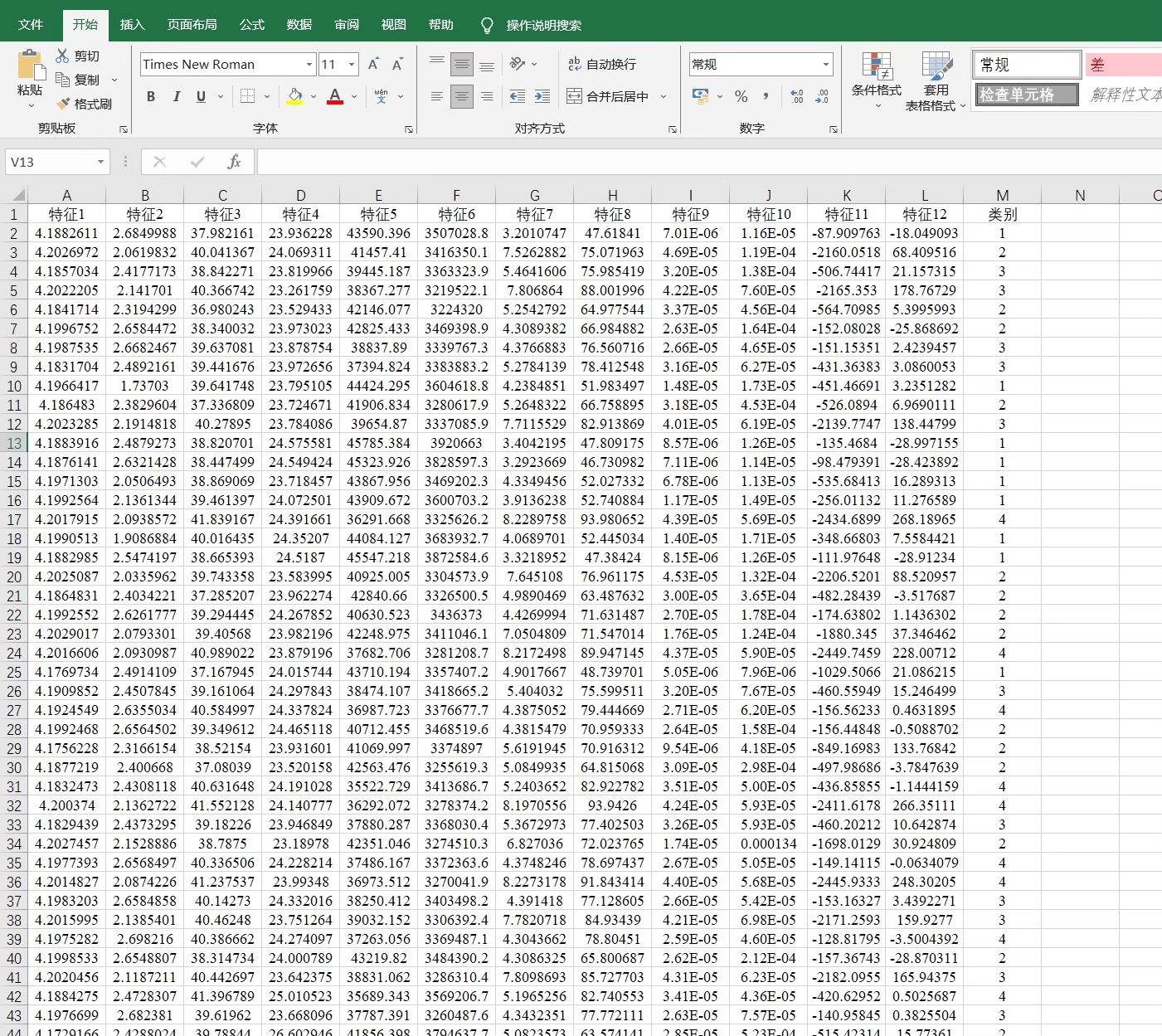
CNN-LSTM-Attention基于卷积-长短期记忆神经网络结合注意力机制的数据分类预测 Matlab语言程序已调试好,无需更改代码直接替换Excel即可运行1.多特征输入,LSTM也可以换成GRU、BiLSTM,Matlab版本要在2020B及以上。2.特点:[1]卷积神经网络 (CNN):捕捉数据中的局部模式和特征。[2]长短期记忆网络 (LSTM):处理数据捕捉长期依赖关系。[3]注意力
U_DisPlay类继承自PictureBox图像显示模式:支持原始尺寸(Original)、自适应窗口(Fit)、全屏显示(Full)三种模式,通过属性切换,Fit模式可自动调整图像比例适配控件大小,避免拉伸变形;鼠标交互:支持滚轮缩放(每次缩放2倍)、左键拖动图像(仅在缩放后生效)、双击自适应窗口,鼠标悬停时显示像素坐标与灰度值(toolTip1提示),便于精准定位;图形标注:集成集合,支持添
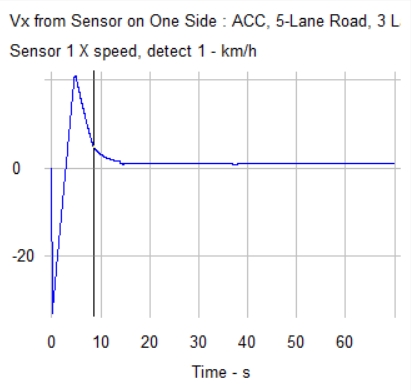
通过MPC、Carsim和Matlab的联合应用,我们可以实现一个高效且精确的车辆自适应巡航控制系统。MPC通过预测系统未来的行为来优化控制策略,Carsim提供了精确的车辆动力学仿真,而Matlab则提供了强大的数值计算和控制算法设计工具。这三者的结合,使得ACC系统能够在复杂的交通环境中保持安全距离,并提供舒适的驾驶体验。在未来,随着智能驾驶技术的不断发展,MPC和其他先进控制方法将在车辆控制
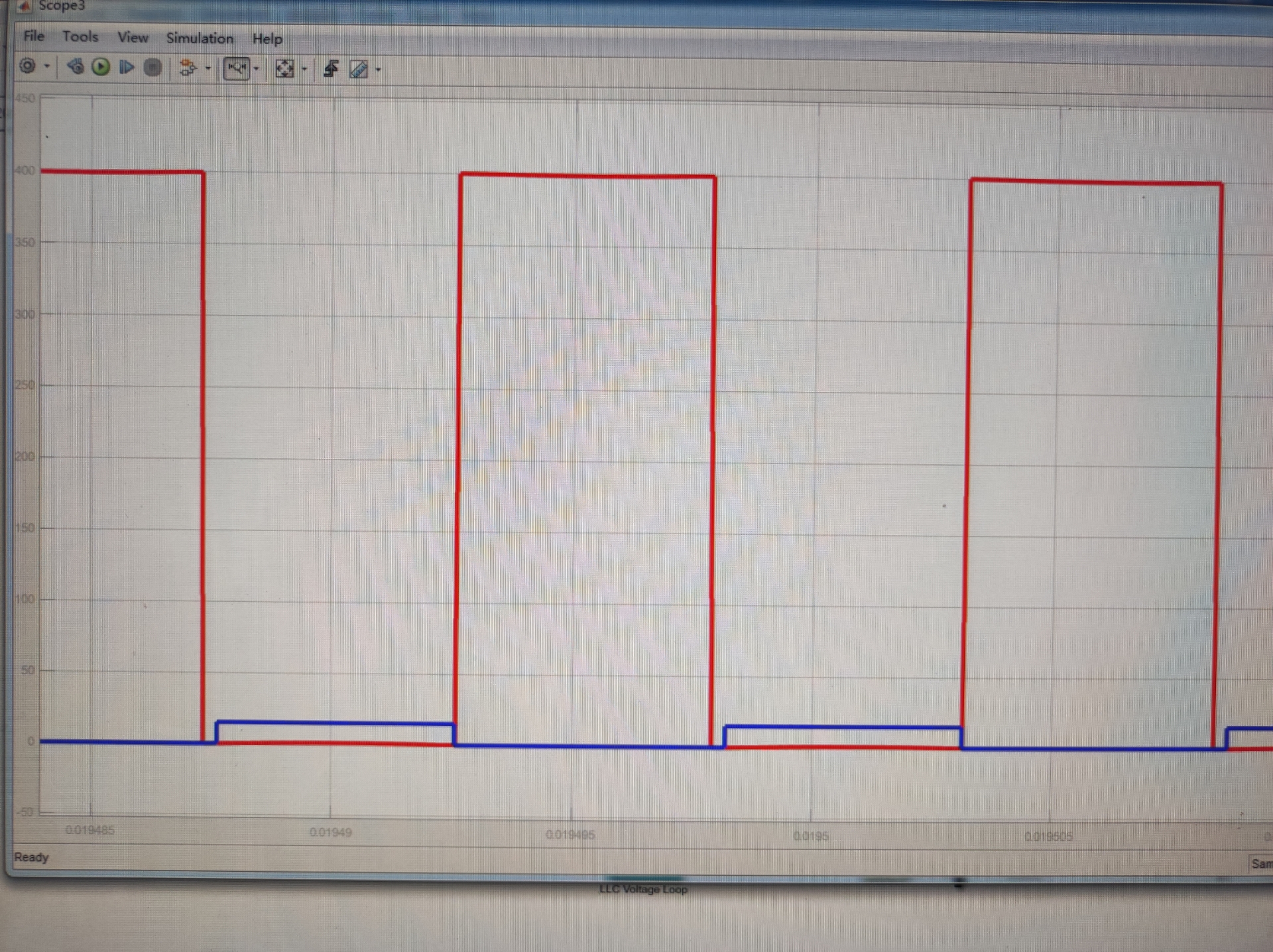
最后附上仿真文件里的彩蛋:在Initialize回调函数里藏了个参数自检功能,跑仿真前自动校验参数是否在安全区,专治手滑输错参数的新手。咱们这次在Matlab里搭了个全桥LLC闭环系统,实测DS电压波形和驱动信号完美错位(见图2),零电压开通稳得一批。ZVS全桥LLC谐振DCDC变换器 matlab仿真,电压闭环控制,实现ZVS软开关(图2DS和驱动波形)。ZVS全桥LLC谐振DCDC变换器 ma
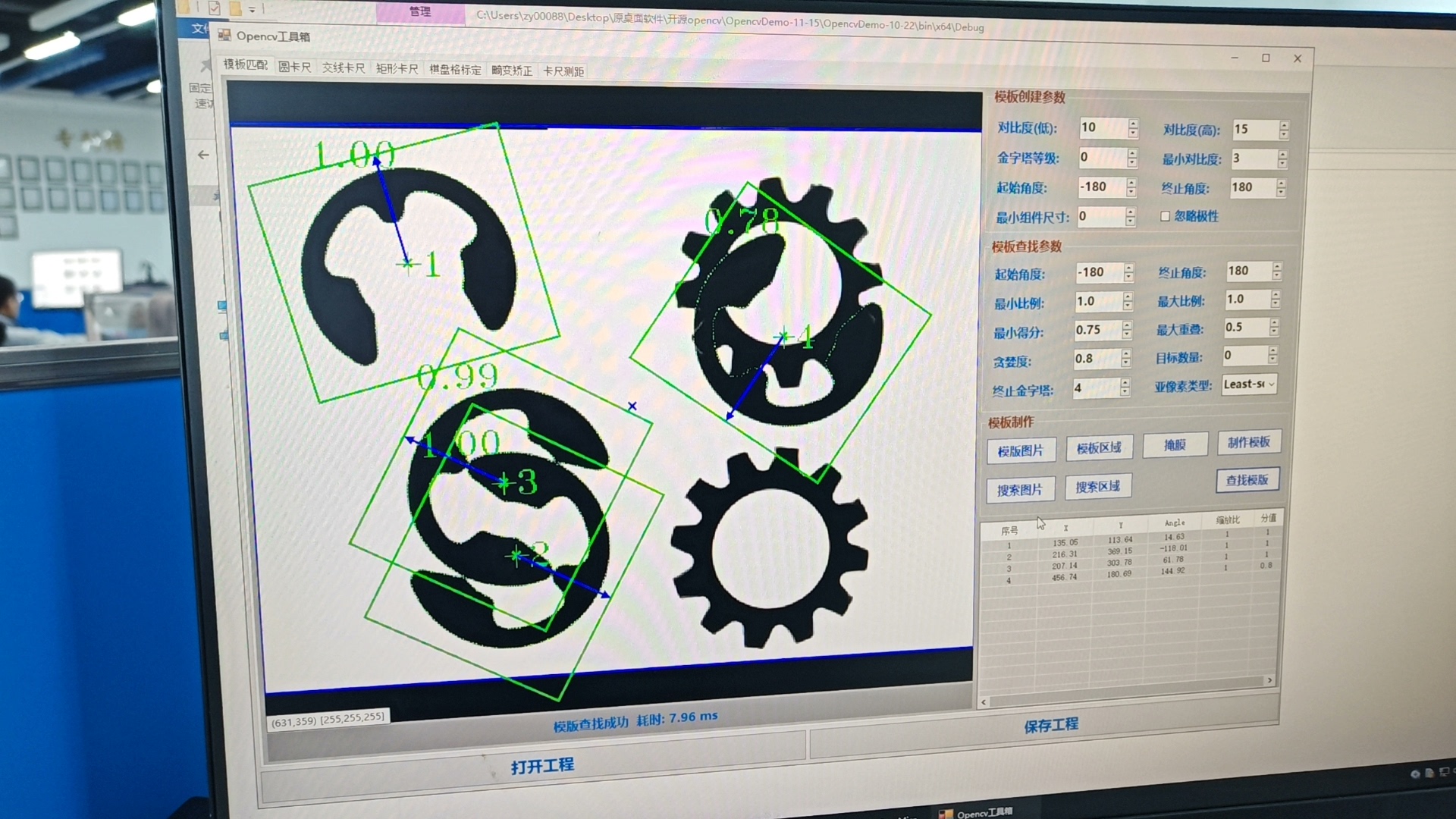
Qt+OpenCV图像视觉框架全套源码上位机源码工具可扩展。除了opencv和相机sdk的dll,其它所有算法均无封装,可以根据自己需要补充自己的工具。基于 Qt5.14.2 + VS2019 + OpenCV 开发实现,支持多相机多线程,每个工具都是单独的 DLL,主程序通过公用的接口访问以及加载各个工具。包含涉及图像算法的工具、 逻辑工具、通讯工具和系统工具等工具。最近捣鼓了一个超有趣的项目—
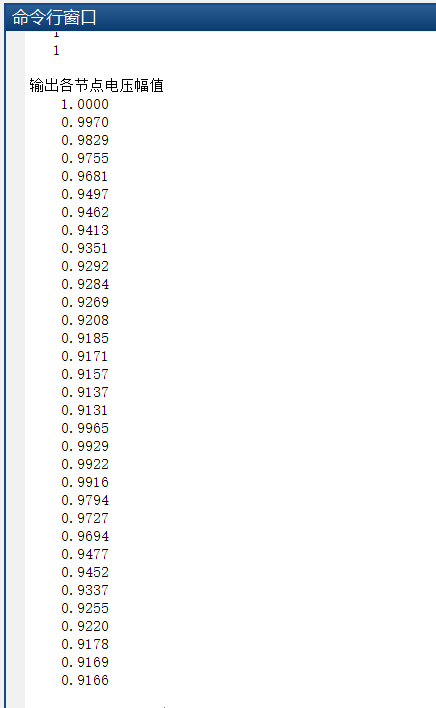
前推回代法主要适用于辐射状网络,像IEEE33节点系统就很典型。它的基本思路是先假设末端节点电压为额定值,然后从末端向电源端推算各支路的电流和功率,这就是“回代”过程;接着再从电源端向末端推算各节点的电压,此为“前推”过程。不断重复这两个过程,直到各节点电压收敛。
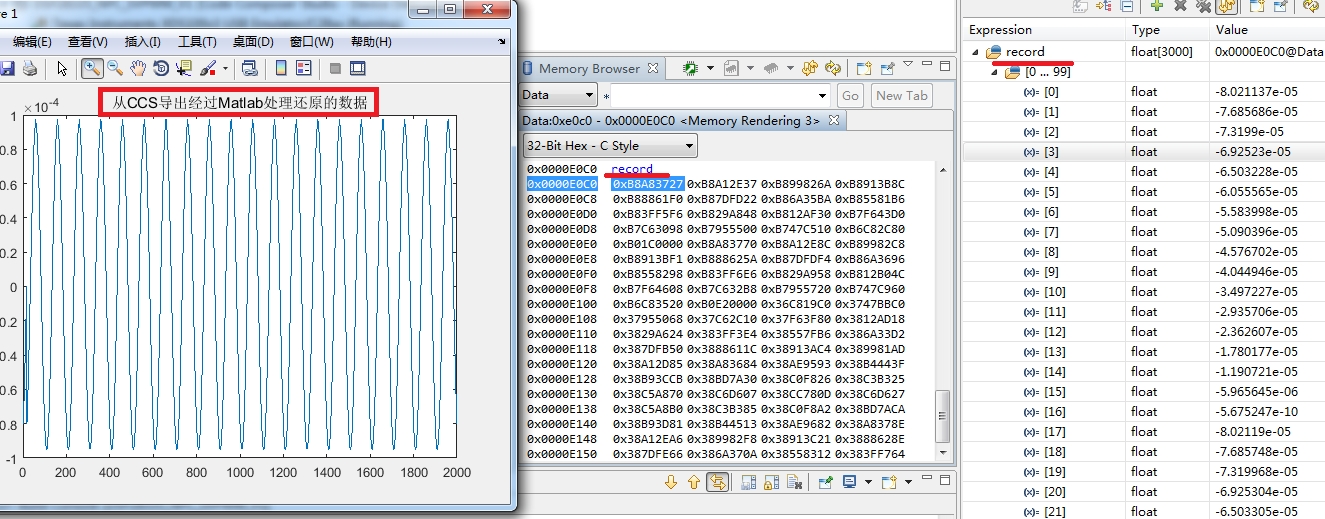
DSP280049C串口升级方案串口升级方案,提供bootloader源码,上位机,用户示例工程,操作说明书。提供。在嵌入式开发的世界里,设备的升级一直是个重要的话题。今天咱就来聊聊DSP280049C的串口升级方案,这个方案可是诚意满满,不仅提供了bootloader源码,还有上位机、用户示例工程以及操作说明书。
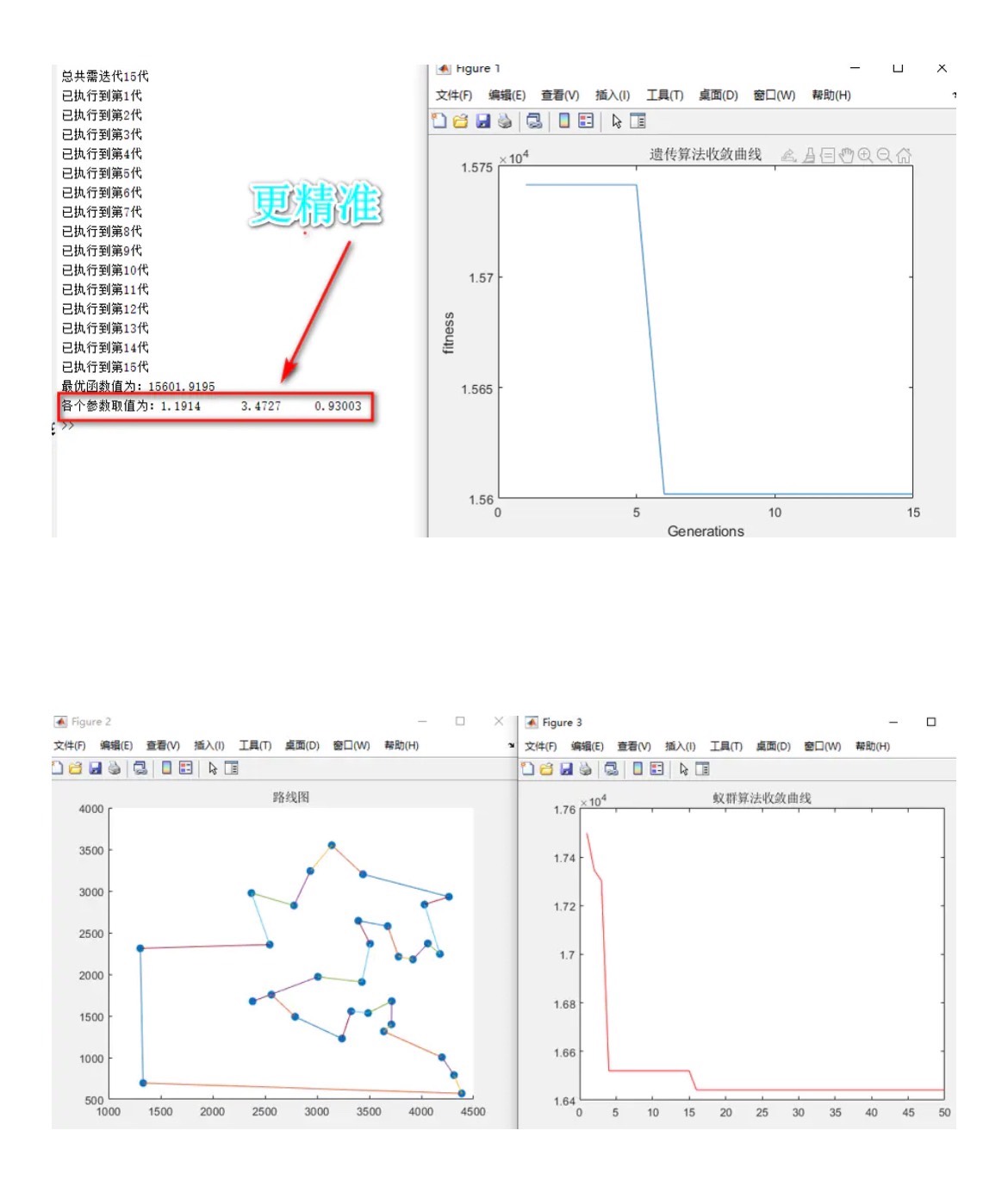
先看核心玩法:用遗传算法当红娘,给蚁群算法(ACO)的关键参数自动找对象。关键找到了意料之外的参数组合:alpha=3.21(偏高),说明信息素权重可以比常规设置更大,beta=1.07(偏低)说明不必过分依赖启发式信息。实验室调参侠的福音来了!Ga-ACO,解决蚁群优化受参数影响较大的问题,将阿尔法,贝塔,Q或者挥发因子等参数进行优化求解,避免人为经验选取,使效果更佳。Ga-ACO,解决蚁群优化