- @goBivvhok
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
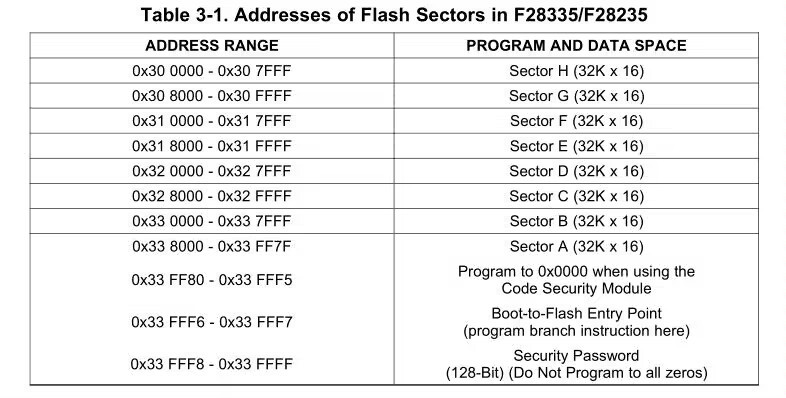
下位机的dsp上电由一次boot引导至flash,flash内根据cmd文件划分两个工程,分别二次引导程序(boot)和app程序;下位机的dsp上电由一次boot引导至flash,flash内根据cmd文件划分两个工程,分别二次引导程序(boot)和app程序;最近在搞DSP28335的远程升级方案,被CAN总线和双DSP联调折腾得够呛。dsp28335的在线升级(IAP),can总线,锁了2个
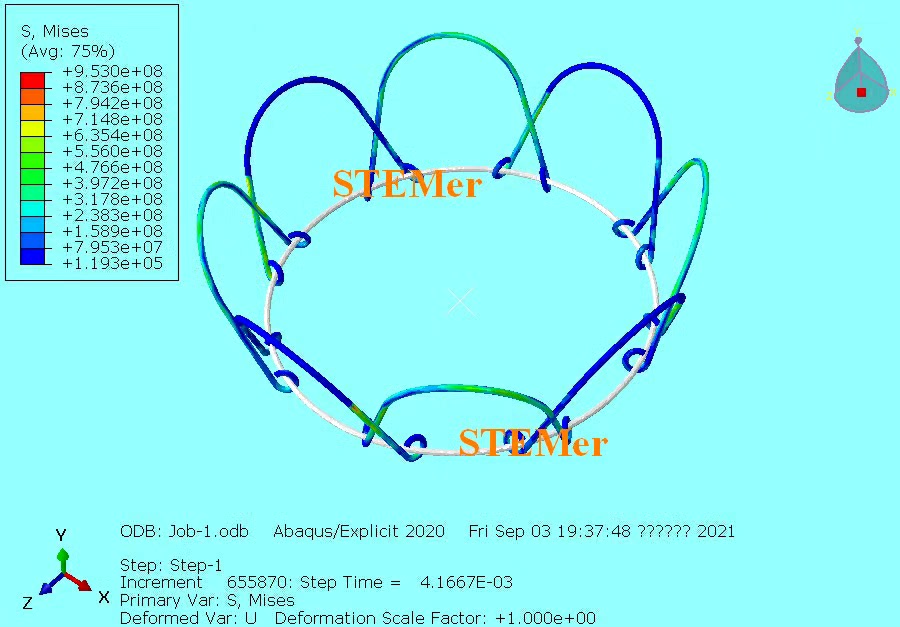
ABAQUS模拟大折展比折展结构,模型与钢丝灯罩类似,可用于大折展比机械臂、机器人研究中可参考公众号STEMer推文《大折展比钢丝结构》最近在研究大折展比折展结构,发现它和我们常见的钢丝灯罩模型极为相似,这东西在大折展比机械臂以及机器人的研究领域,那可有着相当重要的价值。今天就和大家唠唠用ABAQUS模拟这个结构的事儿。
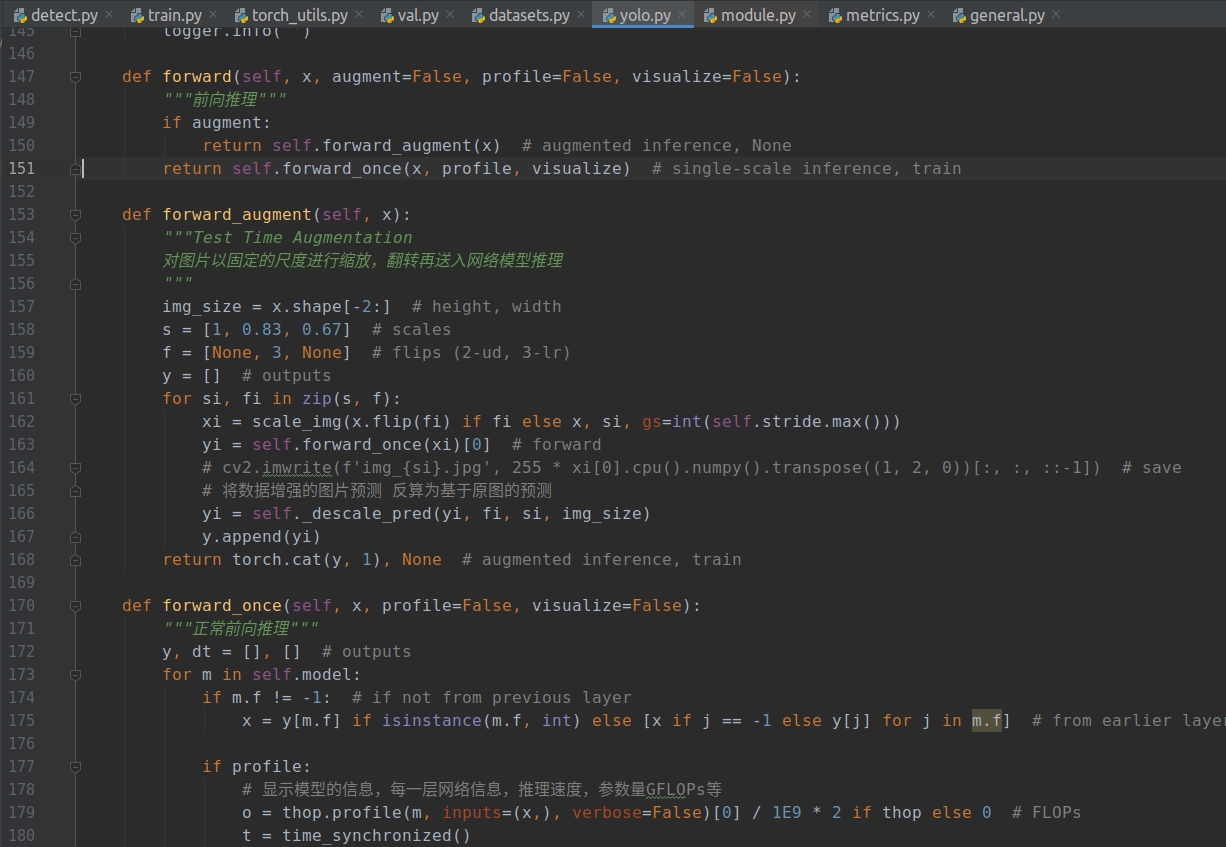
看着不断跳动的数字,仿佛能感受到神经网络在参数空间里蹦迪的节奏。这个变换矩阵会随机生成上下左右30度以内的旋转,配合HSV颜色抖动,让模型在虚拟世界里体验各种极端路况。直接扒开YOLOv5的代码仓库,迎面而来的utils文件夹里藏着不少好玩的工具。就像在背包里藏了把瑞士军刀,需要的时候随手就能掏出来用。官方yoloV5开源代码注释,基本每个文件夹和模块都有注释,非常详细。官方yoloV5开源代码注
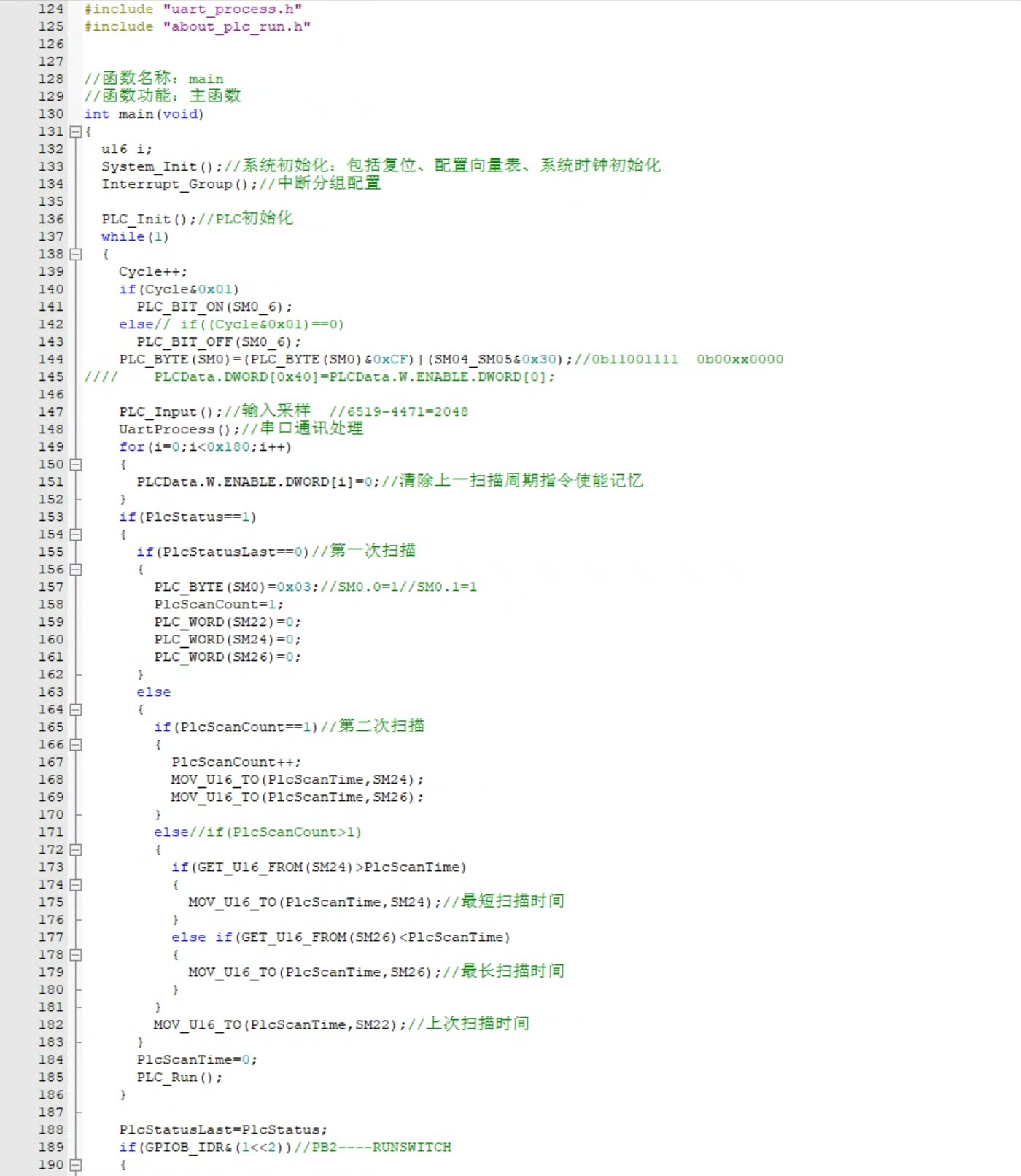
今天咱们就聊聊怎么用这颗芯片跑起西门子S7-200的PLC程序,直接拿STM32硬刚西门子祖传架构,这事儿听着刺激吧?移植过程中最坑的是保持寄存器的掉电保存,STM32的Flash写入次数有限,直接照搬西门子的存储策略会快速写废芯片。这段代码把PA0-PA7映射成PLC的I0.0-I0.7输入点,IPU模式(内部上拉)是重点,工业现场干扰大,上拉比浮空稳定得多。西门子PLC的IO地址是固定编码的,
LT6911UXC和LT9611UXC芯片凭借其强大的功能和灵活的配置,成为HDMI转MIPI应用中的佼佼者。无论是智能电视、车载显示系统还是工业显示设备,这两款芯片都能提供出色的性能和可靠性。对于开发者来说,龙讯半导体提供的丰富开发资源也大大降低了开发难度,缩短了开发周期。龙讯lt6911uxc,lt9611uxc资料,有源码固件,支持4k60,支持对接海思3519a和3559a,hdmi转mi
跑出来的电价曲线通常会呈现双峰特征——早高峰前和晚高峰后的电价洼地,这正是博弈均衡的精妙之处。有个反直觉的发现:当电网批发电价波动超过18%时,最优策略不是跟随涨价,而是逆向操作平抑波动,这可能是模型内置的风险对冲机制在起作用。这种主从博弈建模最妙的地方在于,它既不是"代理商说了算"也不是"车主占便宜",而是通过数学规划找到那个微妙的平衡点。另外,还进一步通过 Karush-KuhnTucker
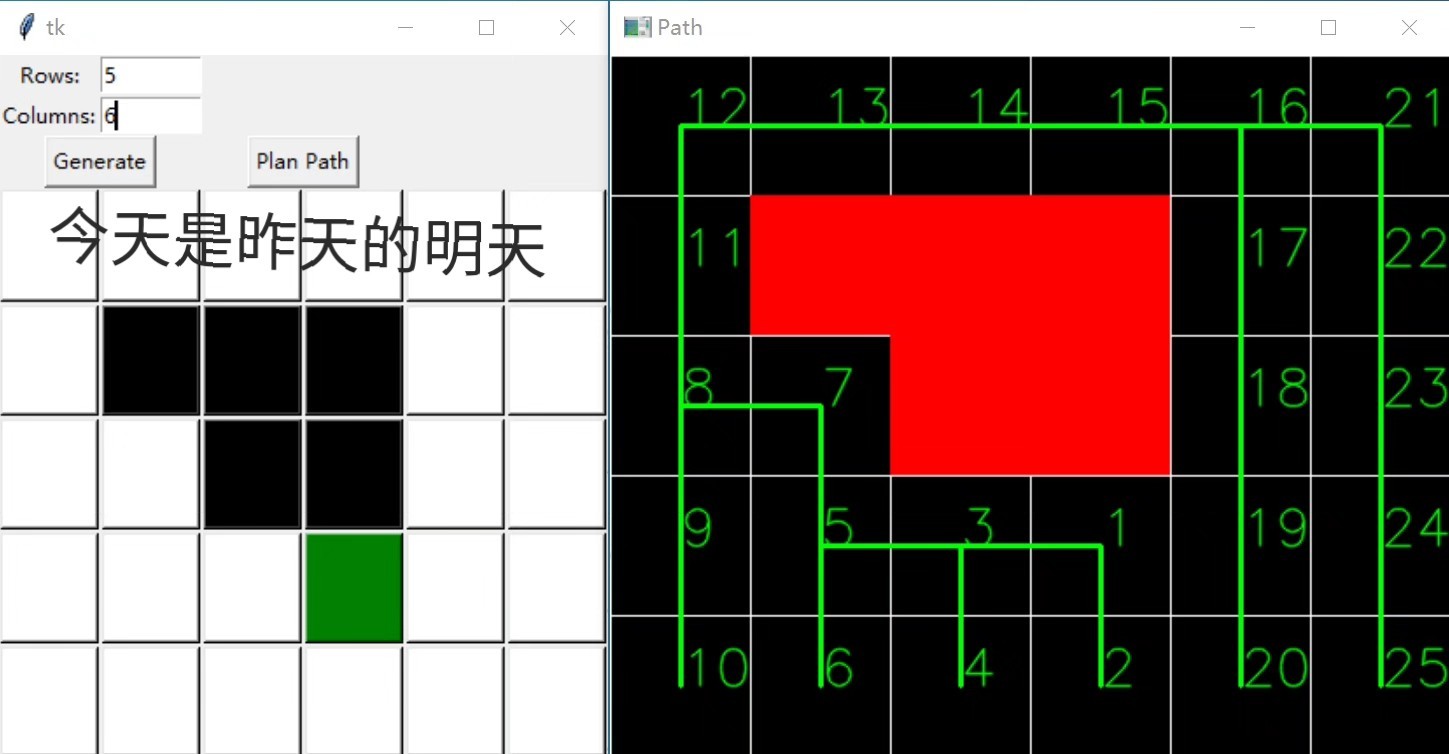
移动机器人全覆盖路径规划代码基于深度优先搜索(DFS)算法,广度优先搜索(BFS)算法,生成覆盖树(STC)算法,最小生成树(MST)算法等等的全覆盖路径规划代码matlab Python版本在移动机器人领域,全覆盖路径规划是一个关键问题,它关乎机器人如何高效地遍历给定区域。今天咱们就来讲讲基于深度优先搜索(DFS)、广度优先搜索(BFS)、生成覆盖树(STC)以及最小生成树(MST)算法的全覆盖
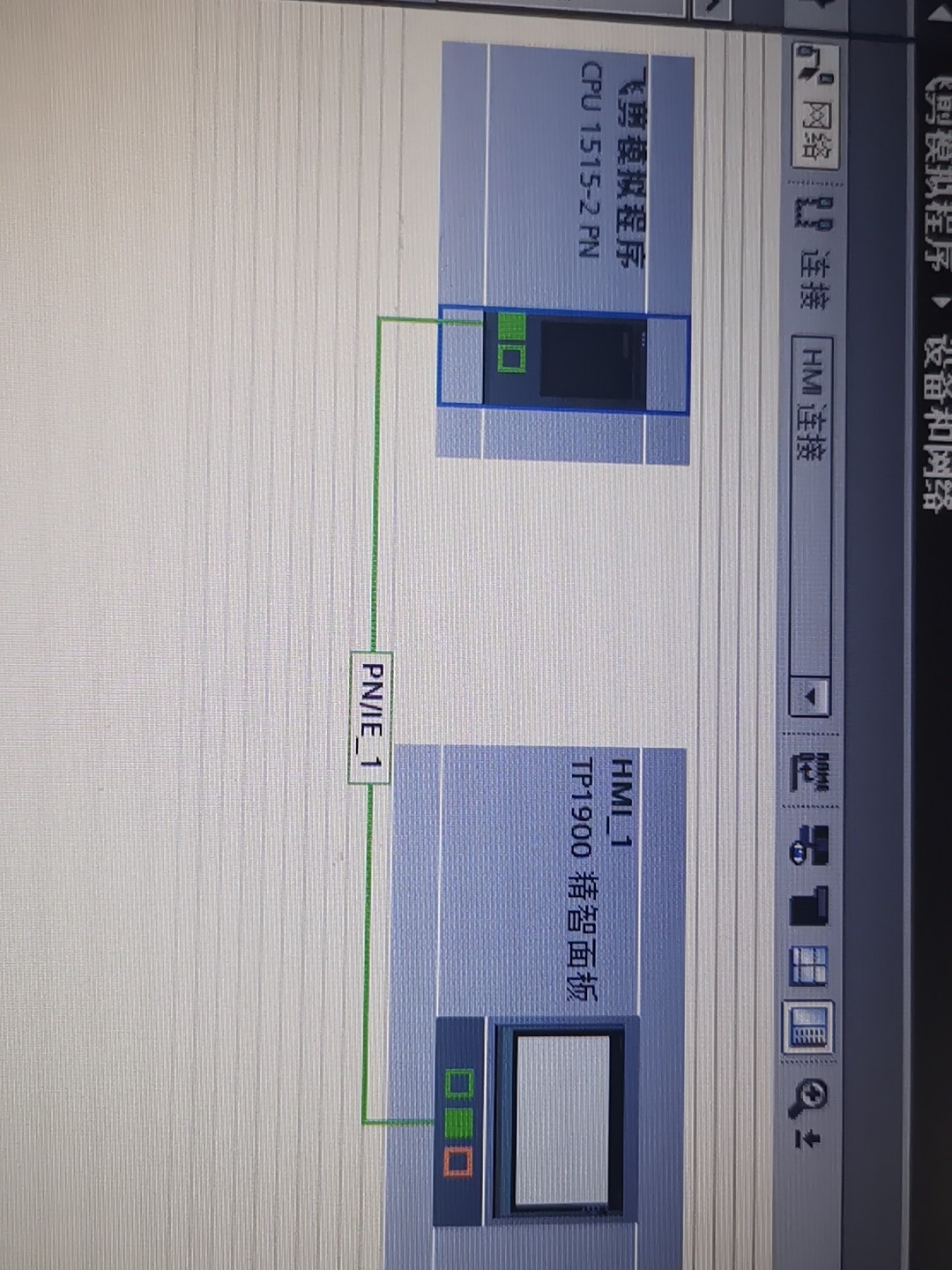
在博图的OB1(组织块1,程序循环执行的地方)里,我们先定义一些关键变量。// 定义物料速度变量// 定义物料位置变量// 定义刀具启动标志这里用来记录物料的运动速度,单位可以是米每秒;记录物料当前位置;是个布尔变量,用来标志刀具是否该启动。
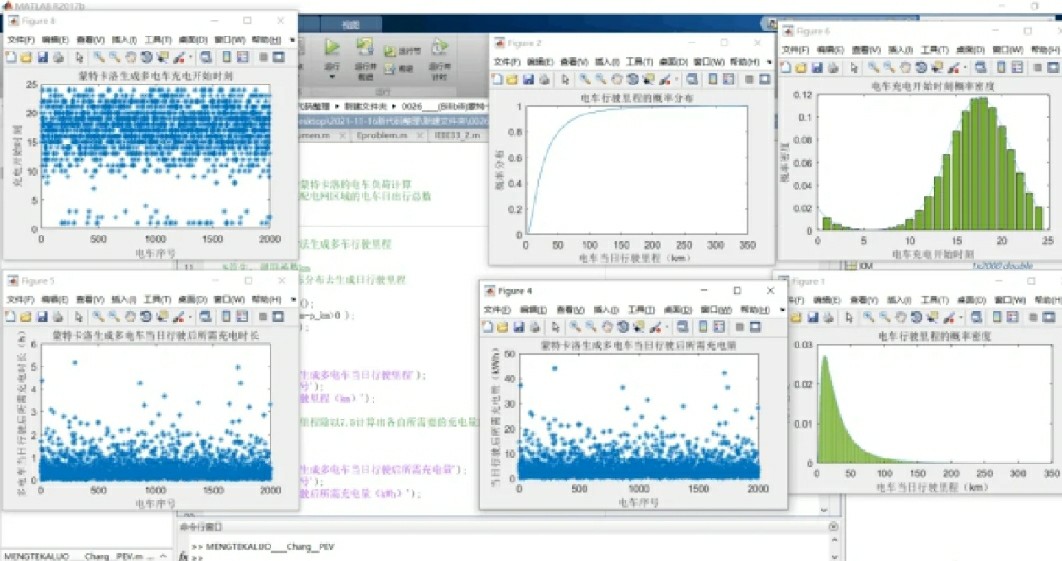
在matlab中用蒙特卡洛算法对电动汽车充电负荷进行模拟,可自己修改电动汽车数量,复现。参考论文:基于V2G的电动汽车充放电优化调度策略有注释简单易懂,可随意调整参数。最近研究了一下在Matlab环境下,利用蒙特卡洛算法对电动汽车充电负荷进行模拟的实现,这个过程还挺有趣的,今天就来跟大家分享分享。蒙特卡洛算法简单来说,就是通过大量随机试验,利用随机事件出现的频率来估计我们想要的结果,在电动汽车充电
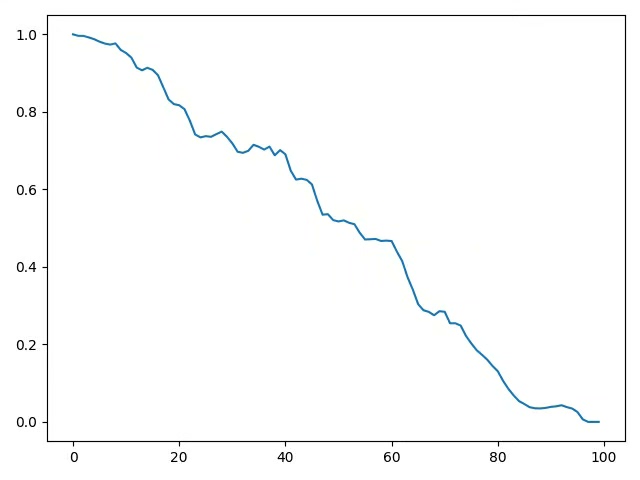
这个atomicAdd操作相当于让每个线程在计算密度场时顺手投票,全局计数器phase_counter每1000步通过cudaMemcpyAsync异步传回主机端,配合Python的matplotlib就能画出动态曲线。把这些技术堆叠起来,模拟页岩油在压裂液驱动下的流动时,能看到明显的指进现象——水相像树根一样在复合材料中蜿蜒前进,而饱和度曲线实时跳动就像流体在显卡里跳踢踏舞。table可以通过C