




- @crasher123
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
🔹 期刊级别:已被JST日本科学技术振兴机构数据库收录(2024),并且是北京大学《中文核心期刊要目总览》中的重要期刊,学术影响力巨大!🔹 主办单位:中国计算机自动测量与控制技术协会精心策划,专注于计算机自动化技术与精密测量控制,内容专业而深入!如果你对计算机测量与控制领域的最新发展和技术趋势感兴趣,那就不容错过这本权威期刊——《计算机测量与控制》!无论你是从事测量技术、自动化控制领域的科研人

随着风能产业的飞速发展,风力发电已成为全球清洁能源的重要来源之一。然而,风机叶片的损坏与老化问题依然是影响风机性能与稳定性的重要因素。传统的人工检测方法不仅效率低,且容易错过细小的缺陷,导致无法及时维修,进而影响风机的正常运转。为了应对这一挑战,我们推出了,借助先进的计算机视觉与深度学习技术,实现对风机叶片缺陷的高效、精准检测,显著提高风电场的运维效率。,通过大量叶片图像数据进行训练,能够准确识别

YOLOv12(You Only Look Once v12)是YOLO系列目标检测算法的最新版本,相较于前代模型,YOLOv12在检测速度和精度上有了大幅度的提升,特别适合实时检测任务。数据集包含了多种类型的障碍物图像,涵盖了不同天气、光照和季节条件下的铁路环境,保证了研究的全面性与实用性。无论是白天、黑夜,还是雨雪天气,YOLOv12都能够在实时视频中精准检测出铁道上的障碍物,确保行车安全。别

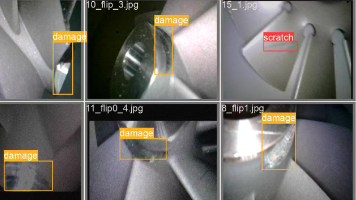
涡轮叶片缺陷检测数据集yolo格式1300张左右在研究涡轮叶片缺陷检测的过程中,数据集的选择和格式处理是一个至关重要的环节。特别是当你打算通过卷积神经网络(CNN)等深度学习模型进行缺陷检测时,数据集的标注和格式化直接影响到模型的训练效果和论文的质量。本文将重点探讨的YOLO格式,并分析如何利用这一格式为研究论文提供坚实的基础。
随着全球环境问题的日益严重,河道污染已经成为威胁生态平衡的重要因素之一。传统的垃圾检测方式不仅效率低、成本高,还容易受到天气和光线等因素的影响,无法实时、精准地监测到水体中的垃圾。为了应对这一挑战,我们推出了,借助先进的人工智能技术,帮助您高效、精准地识别和处理水域中的垃圾,保护我们的水资源。,结合计算机视觉和卷积神经网络(CNN),能够在复杂的河道环境中自动识别垃圾,进行实时监测。该系统不仅准确

NPU 是专门为加速神经网络推理任务而设计的硬件加速器。与传统的 CPU 和 GPU 相比,NPU 针对神经网络计算任务进行了硬件优化,因此能够在低功耗和高效能的前提下执行深度学习任务。NPU 在处理图像、语音、自然语言处理等人工智能应用中表现出色。其加速原理基于多个核心技术,下面将详细介绍 NPU 的加速原理、工作方式和其优势。
基于深度学习的电动自行车头盔佩戴检测系统是一种基于YOLOv5和DeepSORT算法的实现方案。它主要解决了电动自行车使用过程中对头盔佩戴的管理问题,有效提高了行车安全性。首先,YOLOv5算法是一种目标检测算法,其主要思想是从输入图像中自动确定图像中的物体位置和类别,可用于各种基于视觉的应用程序。在电动自行车头盔佩戴检测系统中,我们可以使用YOLOv5算法来检测电动自行车骑手是否佩戴头盔。YOL

鸟类作为生态系统中的重要一环,扮演着维持生物多样性和生态平衡的关键角色。然而,随着环境污染和栖息地减少,鸟类保护工作面临着巨大的挑战。传统的鸟类监测方法往往依赖人工观察,效率低且容易漏检。为了提升鸟类保护工作的效率与精准度,我们推出了,通过结合红外图像与最先进的深度学习技术,实现高效、精准的鸟类自动识别与监测,助力生态保护与科研工作。,能够在不同光照和复杂环境条件下,快速、准确地检测和识别鸟类。该

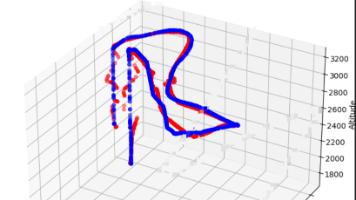
5.数据驱动的方法与深度学习的结合:随着大量无人机飞行数据的积累,数据驱动的方法成为轨迹预测中的主流趋势。2.轨迹预测的挑战:无人机的轨迹预测是一个复杂的任务,需要考虑到多个因素,如环境因素(风速、气温等)、任务要求(路径规划、目标位置等)、无人机自身状态(电池剩余、速度、姿态等)以及与其他飞行物体的碰撞风险。1.无人机技术的快速发展:随着无人机(UAV)技术的不断进步,尤其是在智能控制、计算能力
总体来看,基于深度学习的山体滑坡检测系统研究,已成为遥感智能解译与地质灾害防治领域的重要研究方向。未来研究将更加关注:多源数据融合模型泛化能力系统级应用落地对于正处在论文实验阶段的研究者而言,理清系统架构、实验流程与评估逻辑,往往比盲目追求复杂模型更为重要。
