




- @cocapop
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
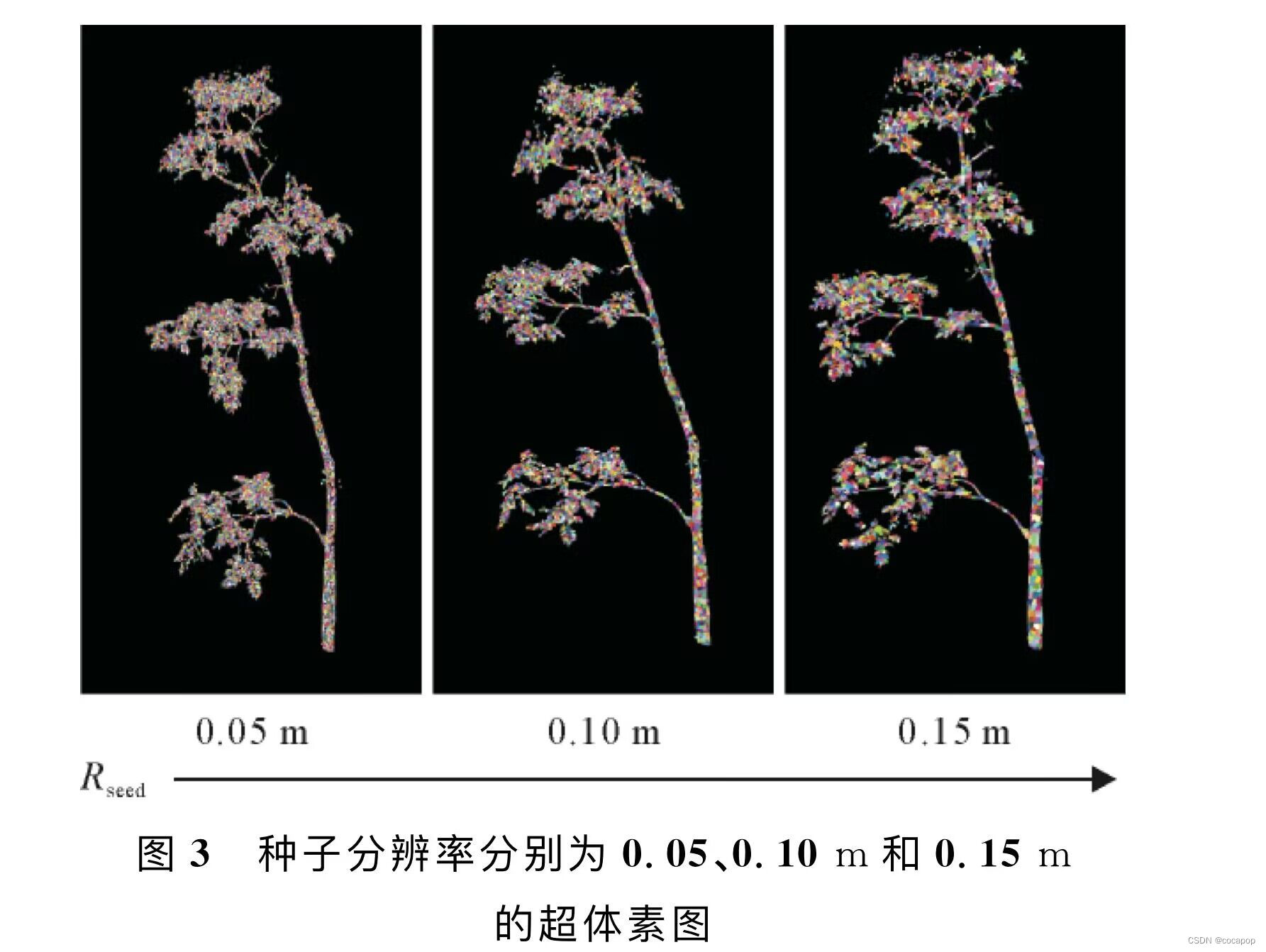
体素云联通性分割算法VCCS(voxel cloud connectivity segmentation,VCCS)是一种超体素分割算法。💛x、y、z是空间坐标。L、a、b是CIELab空间颜色。💛Dc是CIELab颜色空间中的欧氏距离;Dhik是快速点直方图空间中的距离。λ、μ和ε分别是颜色、空间和法向量的权重。💛FPFH是一种位置不变的特征,它利用点的k个。使用八叉树结构对输入的点云数据
1.Dense Fusion原文链接:https://arxiv.org/abs/1901.04780代码链接:https://github.com/j96w/DenseFusion主要思想:从RGBD图中估计已知对象的6D姿态。分别处理两个数据源。使用dense fusion network提取像素级dense feature embedding,并从中估计姿态。本文贡献:①提出一种将RGBD输

点云的法向量是指在点云数据中的每个点处,与该点相关联的法向方向。曲率在点云处理中具有广泛的应用,例如点云分割、特征提取、目标检测、物体识别等任务中,可以用于识别点云中的关键特征点,并为后续处理提供有用的信息。这些数字的具体含义和顺序可能因点云数据的来源和格式而异,因此在使用点云数据时,需要根据具体情况解析和处理这些数字,以正确理解点云数据的含义。法向量:点云数据中的法向量通常表示点的法向信息,用于
PCL库中,超体素分割是一种基于点云体素的连通性分段算法(Voxel Cloud Connectivity Segmentation,VCC)。是一种应用在RGBD相机获取的点云数据中,通过使用基于三维空间的播种方法和使用颜色、几何特征的约束来实现点云的局部约束与聚类。点云体素连接性分割(VCCS)是一种从三维点云数据生成超像素和超体素的新方法。超体素:是二维算法简单的扩展到三维的应用。这种方法不
【姿态表示】旋转向量、旋转矩阵、欧拉角、四元数
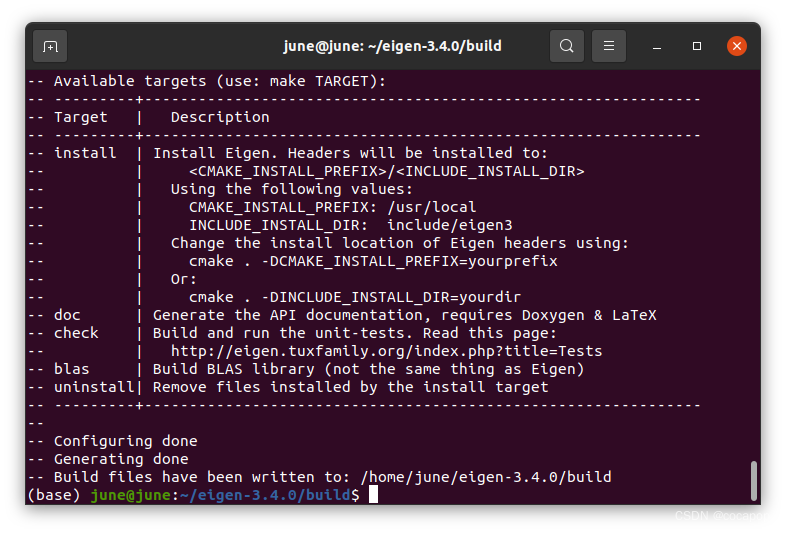
3. cmake编译+install 安装+将eigen文件复制到本地调用文件夹中 /usr/include。2.直接解压:sudo tar -xvzf eigen-3.4.0.tar.gz。is Eigen 3.4.0.的tar.gz的那个。
1.Dense Fusion原文链接:https://arxiv.org/abs/1901.04780代码链接:https://github.com/j96w/DenseFusion主要思想:从RGBD图中估计已知对象的6D姿态。分别处理两个数据源。使用dense fusion network提取像素级dense feature embedding,并从中估计姿态。本文贡献:①提出一种将RGBD输
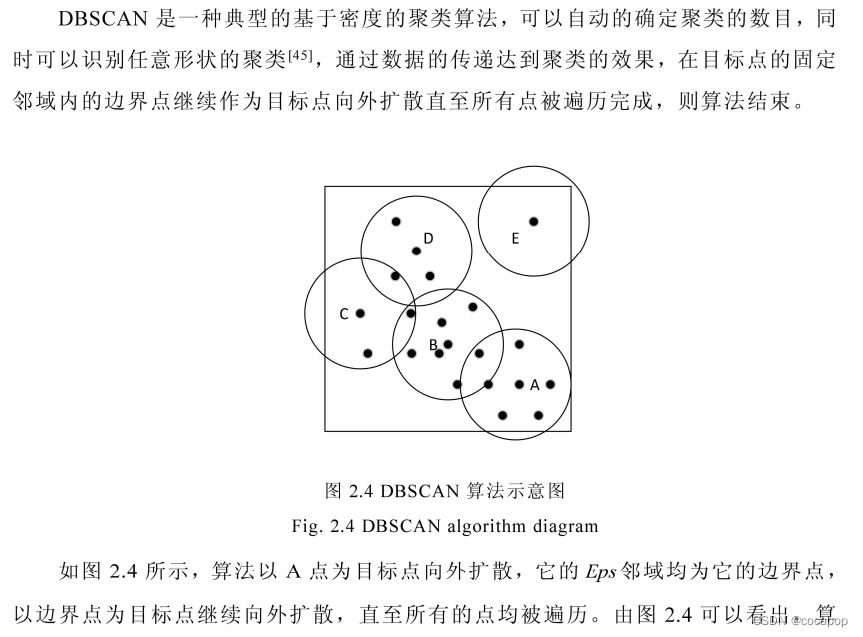
密度聚类算法主要是DBSCAN(Density-Based Spatial Clustering of Applications with Noise。该算法可以识别任意形状的结构,且不需要设定分割数目可以自适应的确定分割数目,达到分类效果。
深度图并不可以直接使用, 因为深度图只能反映出了物体在三维空间中一个方向上的信息,即拍摄场景中各个点到相机的距离。深度相机采集深度图,通过相机内参矩阵,可以将图中每一个像素的位置对应到世界坐标系中,也就是,通过内参矩阵的变化,实现二维到三维空间的映射。( X,Y,Z) 来表示该像素点的三维坐标————》通过这样的转换,我们就可以获得图像中每一个像素点在空间坐标系中对应的三维坐标。物体在世界坐标系中