




- @chinamaoge
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
llama.cpp docker 镜像pull国内加速地址
本章是详细介绍ROS2通信中间件中rclpy模块软件框架。
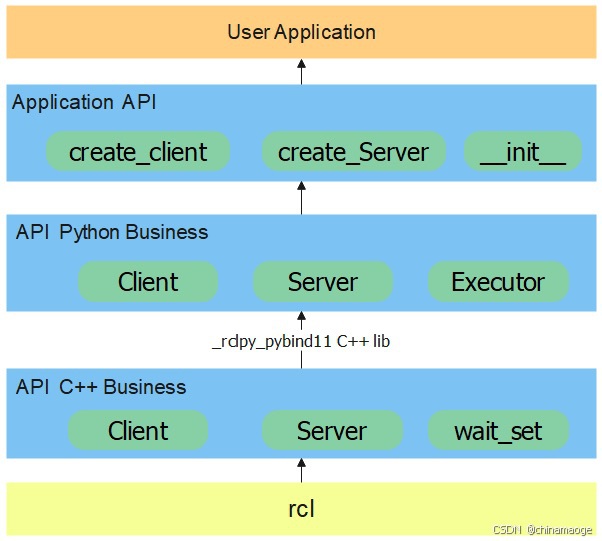
ROS(Robot Operating System) 2 是一个用于开发机器人应用的软件平台,也称为机器人软件开发工具包 (SDK)。ROS2是ROS1的迭代升级版本 ,最主要的升级点是引入DDS(Data Distribution Service)为基础的底层通信系统。这篇博客中将介绍、分析ROS2通信中间件软件架构,并且分析其中优点

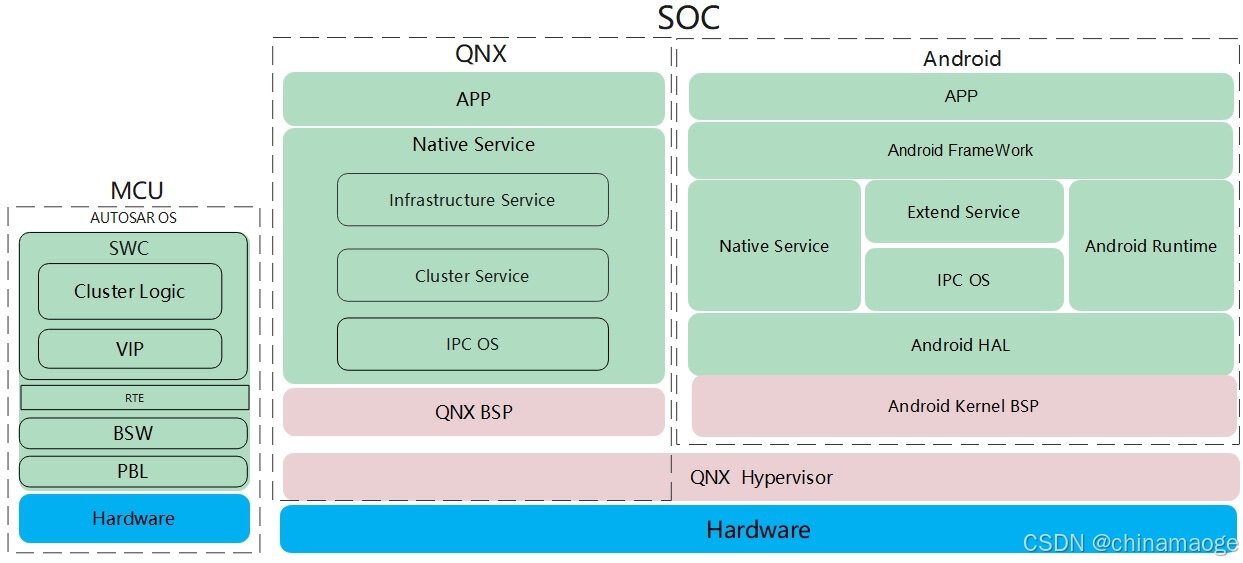
智能座舱域控制器目前承载信息娱乐系统、导航系统、驾驶员辅助系统、车辆监控和控制、安全系统等各种功能。这篇博客主要是对座舱域控制器基于QNX、Android Automtive OS软件架构做一个大致的介绍,如果想要更宽维度的了解,可以看第一篇参考文献,我觉得写得很好。开篇从汽车电子电器架构的演变来讲解为什么会出现智能座舱域控制器。最后我会描述和预测一下未来汽车域控制器软件架构会是怎么样的,以及传统
llama.cpp docker 镜像pull国内加速地址
速度大概是10min下载1%,完全不能接受啊!其中很好的一个加速方式是通过使用github文件加速来替换github下载地址,提升国内用户下载。

TensorRT-LLM框架通过Pybind11实现Python与C++的交互。启动流程中,Python层调用tllm.ExecutorConfig会通过bindings.cpp映射到C++层的ExecutorConfig接口,并进行参数验证。Executor类同样通过C++实现,核心逻辑在Executor::Impl构造函数中完成,包括初始化并行配置、加载模型(如kDECODER_ONLY类型)
《技术人的时代焦虑:从中间件到AI大模型的转型思考》 一位技术从业者分享了自己在手机和新能源汽车行业5年工作后的职业感悟。面对AI技术快速向终端部署的趋势,作者既感到时代变革的紧迫,又对持续学习感到疲惫。30岁的他意识到,传统中间件技术已趋成熟,必须转向LLM方向才能保持竞争力。文章流露出技术人面对行业变革的典型焦虑:既不甘落后又渴望喘息,最终决定转向大模型领域并期待与同行交流。字里行间展现了科技

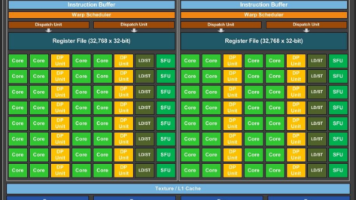
本文深入分析TensorRT LLM插件的架构设计与实现机制,重点以GPTAttentionPlugin为例。TensorRT LLM通过Plugin模块封装LLM推理核心计算逻辑(如注意力机制、FFN等),连接上层Runtime和底层CUDA Kernel。插件注册流程包括initOnLoad初始化、getPluginCreators获取插件创建器、registerCreator注册到Tenso
class TrtGptModelInflightBatching forwardAsync function负责异步调度和执行 LLM 解码阶段的请求。