- @chenai886
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
机械臂的两种关键运动控制方式——MoveL(线性运动)和MoveJ(关节运动)各有特点。MoveL通过协调各关节实现末端执行器的直线运动,适用于焊接、涂胶等需要高精度的场景,但需注意避免路径障碍。MoveJ则允许关节独立旋转,路径呈曲线,适用于搬运等快速移动任务,但需防止关节超限。选择时需权衡精度与速度需求:精密操作选MoveL,快速移动选MoveJ。正确运用这两种方式对提升工业自动化效率至关重要
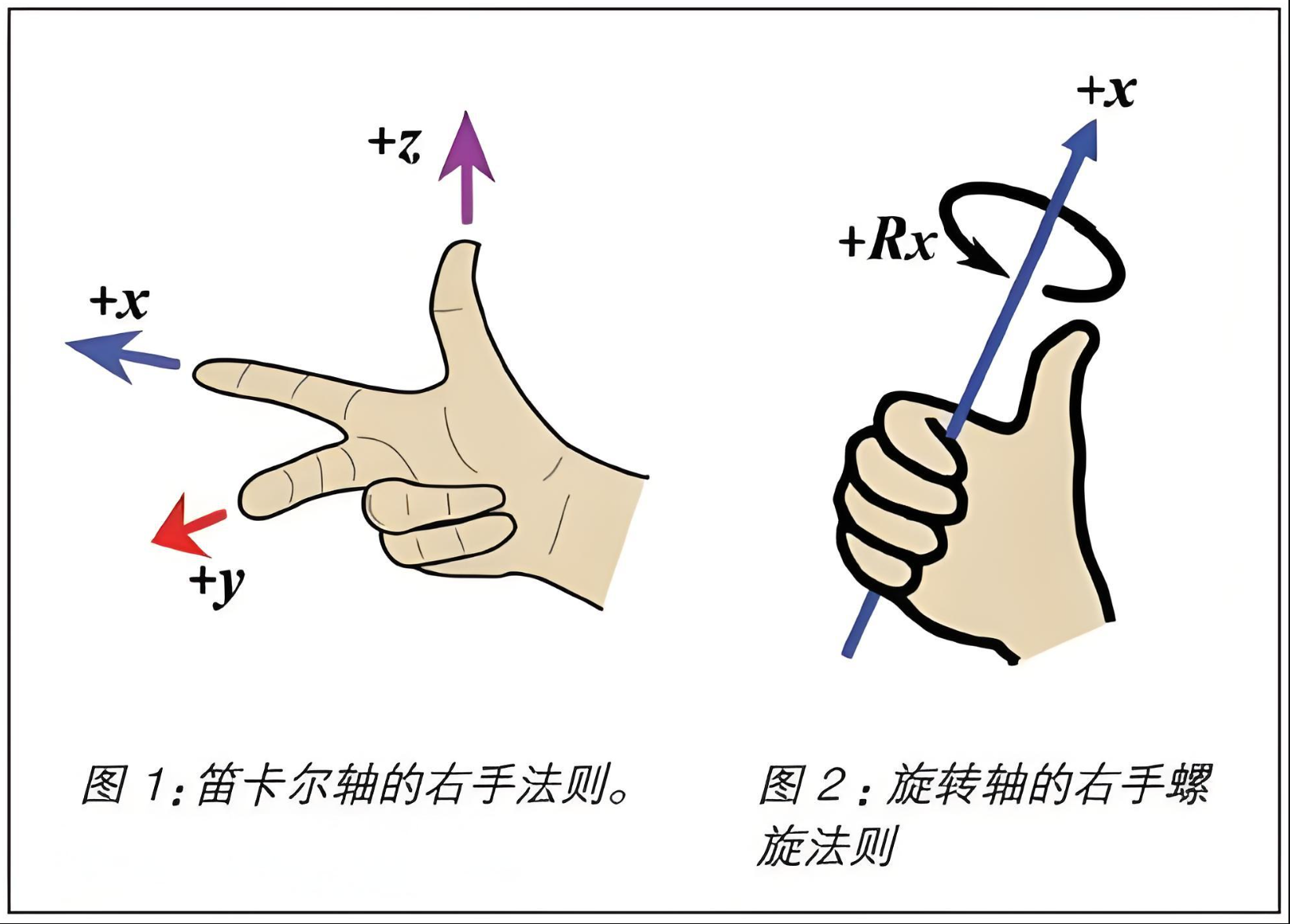
你有没有想过,机器人是怎么在三维空间里精准“跳舞”的?它们可不是随便乱动,而是靠着一套精密的坐标系,像GPS一样指引着每一步。
本文揭示了STM32开发中一个常见但容易忽视的问题:同一IO引脚被多个功能复用导致的冲突现象。通过典型案例(按键与串口复用PA10引脚)分析,指出引脚能复用不等于能同时使用,详细解释了电平冲突的物理原理,并给出分时复用的风险提示。文章强调硬件设计阶段合理规划IO的重要性,提出优先保障关键外设、保留调试资源等实用建议,最后总结引脚冲突的三大本质原因(模式冲突、外设冲突、电平冲突),提醒开发者遇到通信

按键消抖看起来是小问题。但它考验的是嵌入式编程思维。GPIO 读到的是电平。用户操作才是事件。不要一看到低电平就执行。不要动不动就 delay 堵住程序。真正适合项目的按键写法,应该是:定时扫描 + 消抖计数 + 状态判断 + 事件输出下次你的 STM32 按键又出现“按一次触发多次”“短按长按分不清”的问题,别急着怀疑硬件。按下 -> delay -> 执行很多按键翻车现场,问题就出在这里。也欢

摘要: 在单片机开发中,volatile关键字常被忽视却至关重要。文章通过串口中断、按键中断等场景,解释了未使用volatile时编译器可能优化导致的问题:主循环无法感知中断修改的变量。volatile强制每次访问变量都从内存读取,适用于中断修改/主循环读取、硬件寄存器等场景。但需注意,它不保证原子操作,多线程共享变量仍需中断保护或RTOS机制。文末总结了volatile的使用场景,并提醒避免滥用

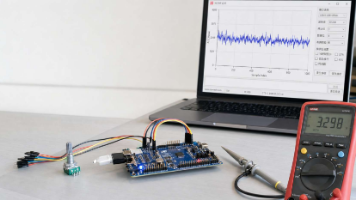
STM32的ADC采样数值跳动问题往往源于硬件而非软件。主要排查方向包括:1. 电源稳定性(VREF波动直接影响ADC精度);2. 采样时间不足(高阻抗信号源需延长采样周期);3. 硬件干扰(PWM/电机等噪声耦合)。建议采用"GND-3.3V-分压点"三级验证法快速定位问题源,软件层面可通过多次平均(如16次采样)和一阶滤波改善显示效果,但需注意滤波无法根本解决硬件缺陷。典型解决方案包括:输入脚
摘要: Lambda 表达式是C++11引入的匿名函数特性,支持捕获外部变量、传递参数和灵活定义函数体。其结构包括捕获列表([])、参数列表、可选修饰(如mutable)、返回类型和函数体。捕获方式支持按值([=])或按引用([&]),并可显式指定变量。Lambda在Qt中广泛用于信号槽连接,简化事件处理代码,提升可读性和效率。例如,connect(button, &QPushBu
设计模式学习的关键在于理解其背后的核心问题,而非死记硬背定义。23种设计模式可分为三大类:创建型(解决对象创建问题)、结构型(处理类和对象关系)、行为型(协调对象间交互)。掌握这些模式的核心思路比记忆具体实现更重要,它们本质上是在回答三类问题:如何合理创建对象、如何组织代码结构、如何实现对象协作。通过理解这些模式要解决的实际问题,设计模式就能从抽象概念转变为实用的编程工具。

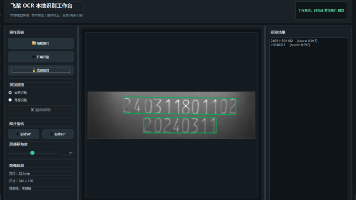
本文介绍了一个基于Qt/C++和PaddleOCR的本地OCR工具,支持全图和局部文字识别,完全离线运行,保障隐私安全。该工具采用PaddleOCR PP-OCRv3中文模型,结合OpenCV进行图像处理,适用于票据、标签等场景。文章详细说明了功能特点、技术方案、目录结构和使用方法,强调其在内网和工业环境中的优势。工具提供完整发布包,包含必要的模型和依赖文件,用户下载后可直接使用。开发过程包括模型
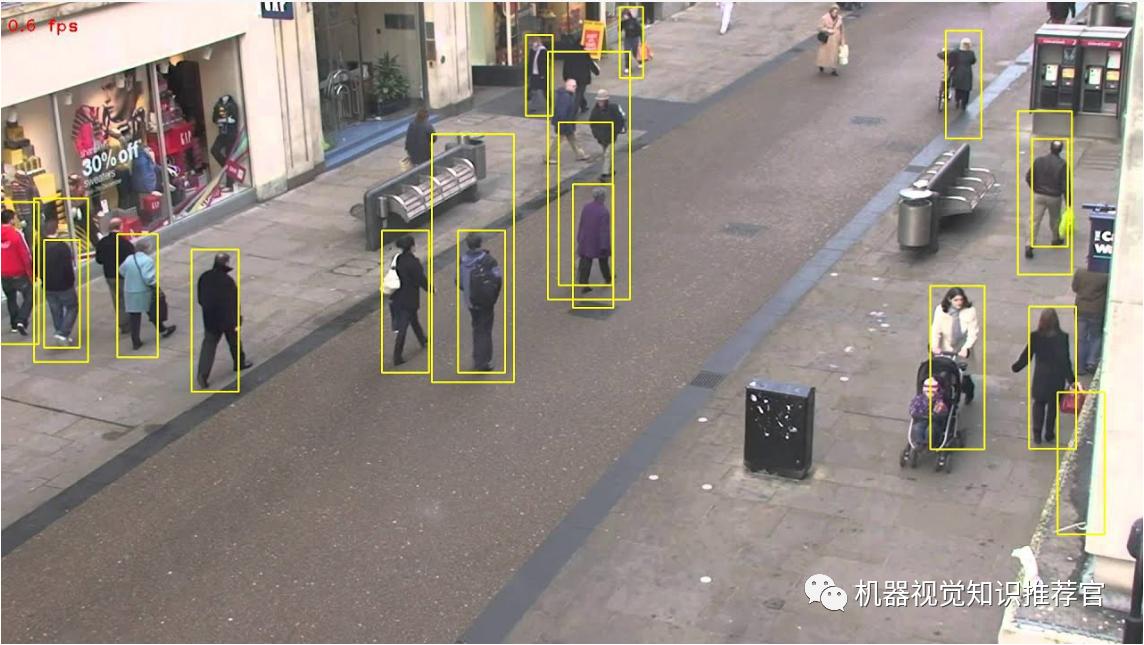
OpenCV和YOLO(You Only Look Once),这些工具在各种视觉识别任务中的强大功能和广泛应用。YOLO是一个流行的实时对象检测系统,它以其速度和准确性在工业和研究领域中广受欢迎。