




- @carryoutw
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
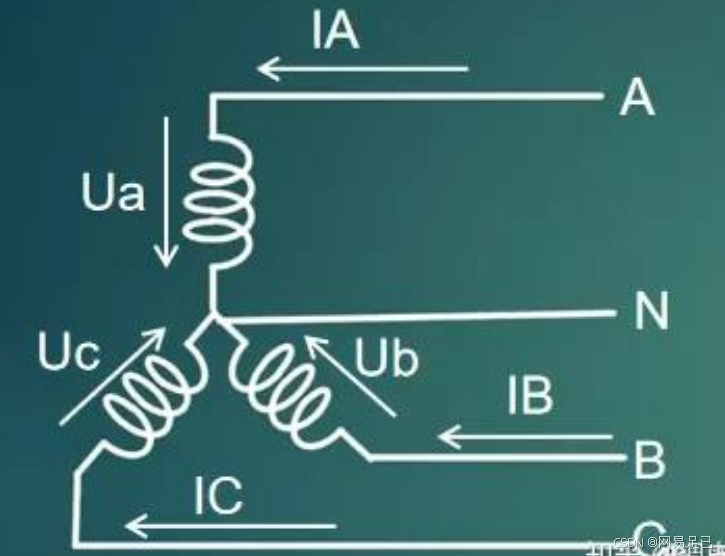
首先要理解一件事,无刷电机的组成一般是由永磁同步电机所构成,包括定子,转子,永磁铁,在电机的选型上永磁体会在转子上也可定子上,其原理就根据磁铁的同性相吸,异性相斥的原理,同时在结构上是没有电刷的,不能够进行机械换向,是通过电子换向来驱动转子不断地转动,电机的接线方法分为星形解法和三角形解法,普遍的接法是星形解法。也就是说如果改变pwm的占空比,就能实现上下桥臂的打开还是关闭的状态,并保证不能同时打
解释:先执行括号里面的结果为0000 0000 0011 0000之后左移8位,为 0011 0000 0000 0000之后右面是&操作,也是0000 0000 0100 1110 并于前面的数据进行| 也就是 0011 0000 0000 0000 | 0000 0000 0100 1110 = 0011 0000 0100 1110。解释:

wa是一个系统无阻尼谐振频率,也就是平常说的谐振频率,根据通式可知,负载的转动惯量是随着末端机构在不同的位姿是不断变化的,所以在实际使用中使用陷波器和整形波形进行消除振动是非常困难的,所以一般使用高次多项式进行对位置,速度,加速度平滑处理,可以减少震动,但是机构的性能会大大降低,速度可能加不起来,齐次的话可以减少振动还可以使用更高级的电机进行让其稳定。但是在实际机器人中,谐振动的频率是不断的变化的

为什么要有一个负载的参数辨识,因为对于整个系统来说,除了负载哈,其他关节都是不变的,出厂时都设置好了,但是负载确是不一样的,有时候会搬运东西,电焊枪等等,都是不一样的。物理一致性 : 动力学参数所代表的物理量与实际中物理属性保持一致的特性,也就是说当估计处理的物体质量是2kg,但是实际是1kg,也是可以的,因为在物理属性中,质量的大小大于0即可。关节处的摩擦力变小了,导致系统的参数辨识精度会变高,
最近在搞基于S函数的动力学方程的验证,刚开始验证动力学方程是不会报错的,但是我换了一个方程进行验证就会出现了这个问题,害的我找了半天,我总结了一下,这个问题大概会出现的问题。第二个,是最不应该发生的问题,因为我验证的是动力学方程的正确性,所以需要大量的公式在S函数,这就导致了打错东西的可能,我这个是。是上图中的这个忘记加上了,按着B站的视频走一遍,写一写是没有问题的。很好,编译通过,动力学也正确。

首先要理解一件事,无刷电机的组成一般是由永磁同步电机所构成,包括定子,转子,永磁铁,在电机的选型上永磁体会在转子上也可定子上,其原理就根据磁铁的同性相吸,异性相斥的原理,同时在结构上是没有电刷的,不能够进行机械换向,是通过电子换向来驱动转子不断地转动,电机的接线方法分为星形解法和三角形解法,普遍的接法是星形解法。也就是说如果改变pwm的占空比,就能实现上下桥臂的打开还是关闭的状态,并保证不能同时打
接上文,已经求出来了正逆解的公式,并且利用matab进行验证,那么接下来就是对p点的位置矢量的式子求一次导得到速度和二次导得到加速度。再次回顾theta1i 是主动臂的角度,theta2i是从动臂的角度(主动臂的角度加上自己相对的角度)接下啦,对两端同时点乘w,得到主动臂的角速度,因为点乘的本质是投影,可以进行化简等。总结:根据文章求出点p的速度,角加速度对于主动臂的角速度和角加速度的关系。(1)
