




- @amuro_ray027
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
查看了一下,估计是gym库的版本高了,在新版本的gym库中mode是由make函数进行指定,而不是由渲染函数进行指定的。试着在本地搭建一个可以运行吴恩达的机器学习教程的环境的过程中。跑到强化学习的章节,老师引入了gym库。
本文介绍了在Windows上搭建吴老师的 Machine Learning Specialization的Lab的运行环境的过程。主要采用了docker技术并启用了GPU加速
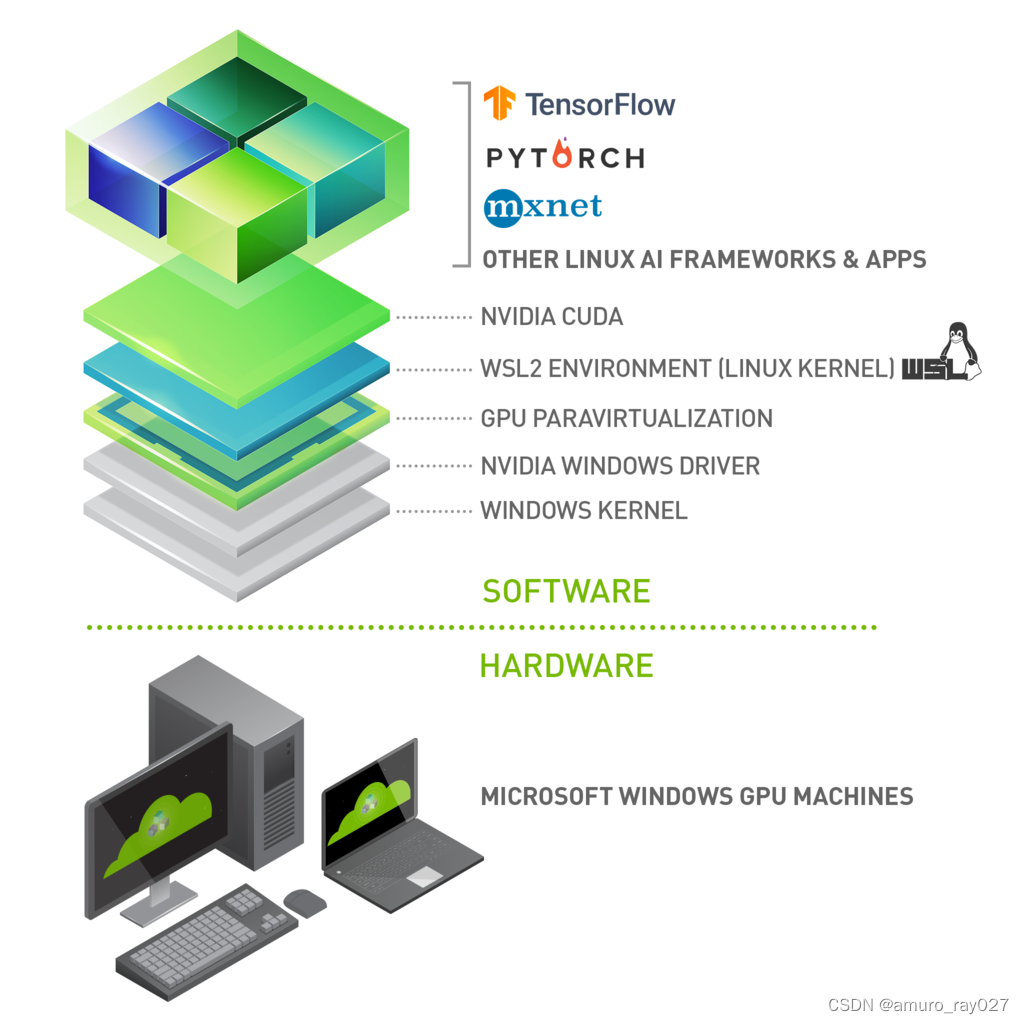
本文介绍了在Windows上搭建吴老师的 Machine Learning Specialization的Lab的运行环境的过程。主要采用了docker技术并启用了GPU加速
Ubuntu apt upgrade后黑屏问题问题尝试最终解决系统现状查看尝试可正常启动的系统内核卸载不需要的内核问题使用着Ubuntu 20.04.2 LTS的情况下,系统一直提示我要执行apt list --upgradable查看更新列完以后,就顺便sudo apt upgrade了一把。结果重启后,就顺利地黑屏了。完全没有任何的光标,但是可以SSH远程进去。尝试参考了网络上的各种解决方案:
ROS2 默认使用的通信中间件是DDS。本文介绍了ROS_DOMAIN使用过程的一些设置和限制。
ROS 2 Foxy 安装手册和踩过的坑官方流程准备工作魔术工具更换国内源安装前提系统要求安装选择安装流程设置语言区域设置源安装ROS2包环境配置验证样例参考之前写过一篇18.04下安装ROS2E的手册,最近要用Moveit2了,发现还是要升级到Foxy Fitzroy,看了看,最新已经到了Galactic Geochelone,所以再记录一下在Ubuntu 20.04下安装ROS 2 Galac
上下标的写法普通的上下标写法相信大家都会了,上标用 ^引入,下标用 _ 引入,注意引入的范围都仅在一个字符,如:y^i_j则表示如下yjiy^i_jyji如果我们需要多个字符的话,直接写,就会是这个效果:y^ix_jyyixjyy^ix_jyyixjy正确的写法则是,我们用花括号将需要写在上(下)标的内容括起来,令它被当作一个整体处理y^{ix}_{jy}yjyixy^{ix}_{jy}yjy