- @abanchao
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
1、读取rosbag的数据,通过时间戳匹配LiDAR每帧里面的每个点和IMU的坐标变换2、通过上面的变换矩阵将利用位姿信息将LiDAR的每帧拼接成点云,迭代优化坐标变换使得距离最小。4.1 改写 loader.cpp这个工具包原本是用来标定激光雷达和里程计的,所以需要改写IMU接口以替换里程计接口。以下代码可以直接复制粘贴使用。将 lidar_align 源码包里的 NLOPTConfig.cma
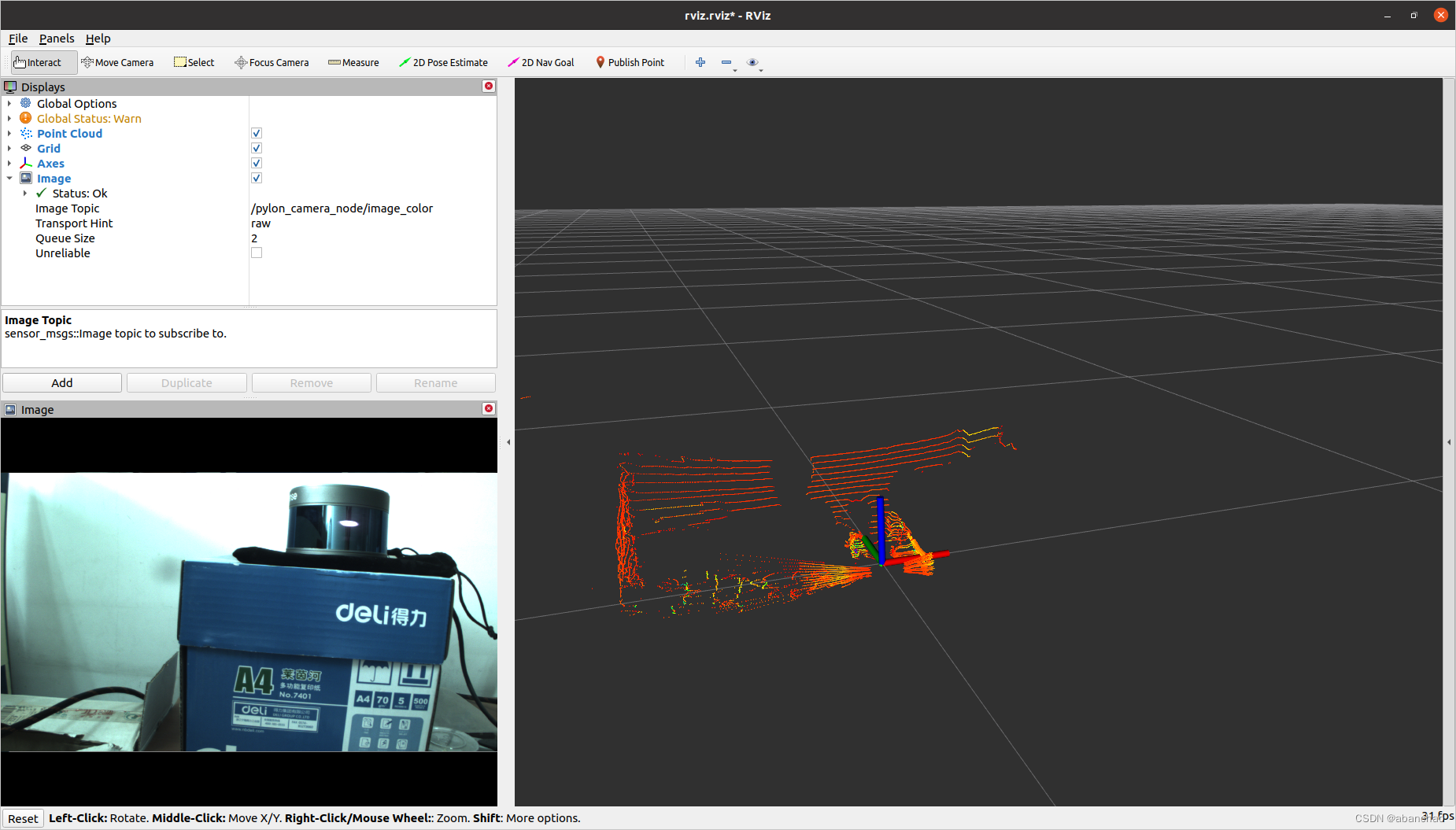
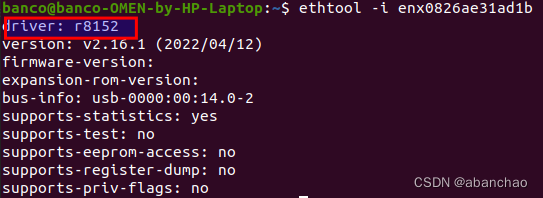
Ubuntu20.04读取basler相机图像,用matlab 202b进行标定,运行环境:Ubuntu20.04(64-Bit)ROS版本:Noetic网卡型号:Realtek RTL 8156外置网卡相机型号:acA 1920-25gc (GigE接口)驱动版本:pylon_6.3.01 准备工作1.1 检查网卡1.2 检查通信2 用SDK驱动读取图像2.1 安装驱动2.2 遇到的问题及解决方
ROS功能包camera_calibration标定相机内参,--size 10x7: 为当前标定板的内点数量,即内部小正方形角点的交点--square 0.05:为每个小棋盘格的边长,单位是米image:=/camera_raw:标定当前订阅图像来源自名为/camera/image_raw的topiccamera:=/camera_raw:为摄像机名通过不停的移动标定板:直到X、Y、Size、S

1、读取rosbag的数据,通过时间戳匹配LiDAR每帧里面的每个点和IMU的坐标变换2、通过上面的变换矩阵将利用位姿信息将LiDAR的每帧拼接成点云,迭代优化坐标变换使得距离最小。4.1 改写 loader.cpp这个工具包原本是用来标定激光雷达和里程计的,所以需要改写IMU接口以替换里程计接口。以下代码可以直接复制粘贴使用。将 lidar_align 源码包里的 NLOPTConfig.cma
笔记本电脑使用usb转RJ45接口的外置网卡,型号为RTL8156,Ubuntu20.04安装网卡RTL8156驱动,使用巨型帧传输工业相机图像。
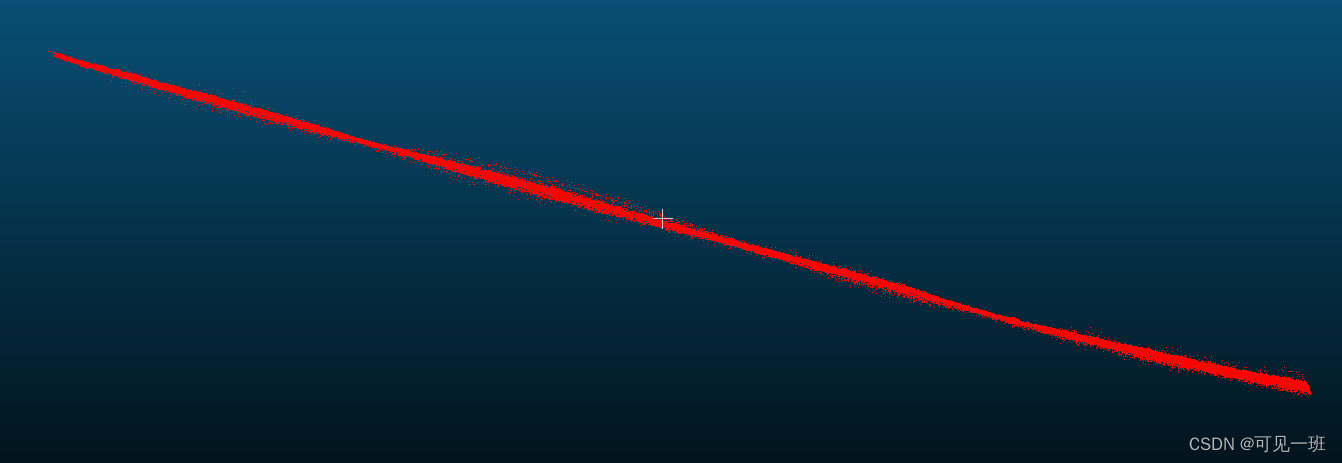
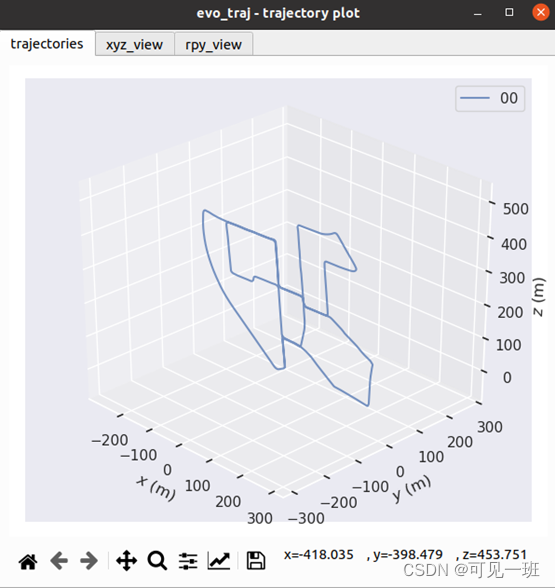
针对轨迹绘制问题,主要包含两个具体问题:其一,怎么让算法生成轨迹文件?其二,怎么使用EVO工具?A-LOAM算法作为最简单的激光SLAM算法,故本文以该算法为例进行学习和调试。安装evo,绘制kitti数据集真值轨迹,修改aloam代码生成tum格式的轨迹文件,用evo绘制所得轨迹
方案一:判断了旋转方向就向下位机发布指令,可以实现转向,但是会出现咯噔咯噔的卡顿现象,因为下位机接收到了指令频率太高了。方案二:在上个方案的基础上增加判断条件,也就是电机工作状态量,用大小为2的队列实现。实现基础:1、上位机、下位机通讯;2、ROS读取前轮转角传感器速度。

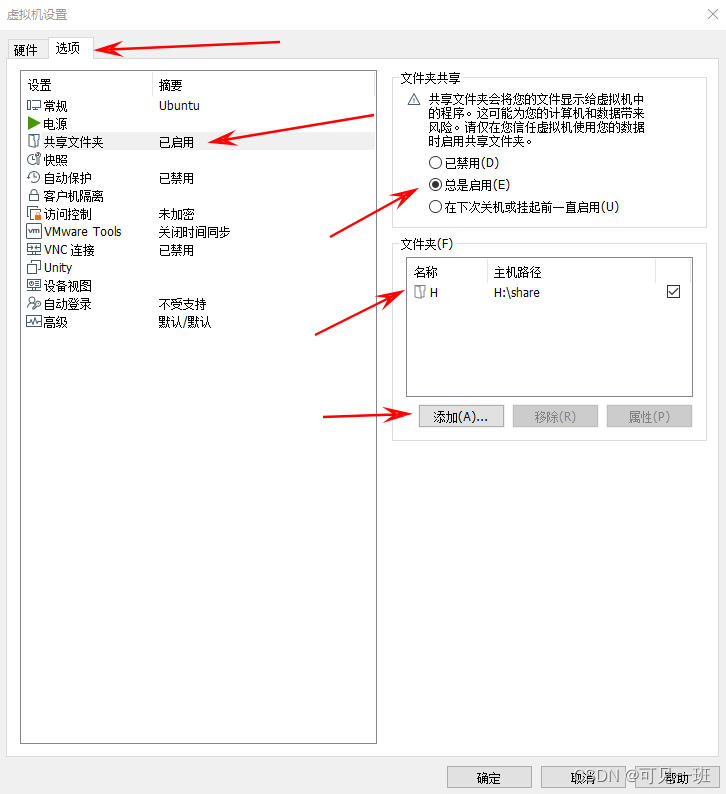
使用VM虚拟机安装了Ubuntu系统,主目录空间越来越小,硬盘扩容之后很快又空间不足,甚至出现了开机卡黑屏的情况,这里记录一下解决过程。

要求VMware Tools,网上的教程一大堆,根据我的经验,Win10安装高版本的VMware就包含了VMware Tools,满足使用需求,而Win7安装VMware后,按照网上的教程无法成功安装VMware Tools,没必要死磕,果断放弃用方法一吧。用Ubuntu自动编辑器gedit修改etc文件夹下的fstab文件,用sudo高级权限打开,最后一行添加代码。其他位置—>计算机—>mnt—