




- @aaaaaaaa123345
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
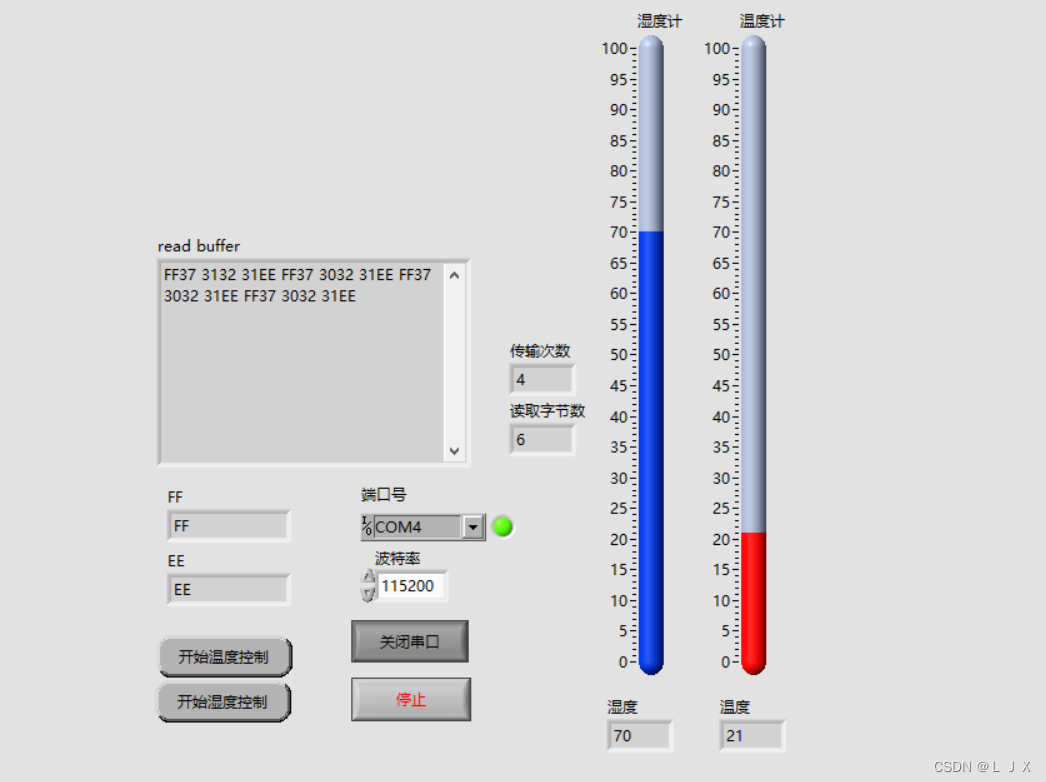
该项目采用泽耀科技的无线串口作为下位机,Labview+无线串口作为上位机读取下位机发来的数据并处理。泽耀科技的产品是我在开发过程中经常用到的,他们不仅产品做的非常不错,而且资料齐全售后也非常给力,后期有技术支持,大大减少开发难度。这个项目中就用到了泽耀科技提供的STM32的驱动代码,不仅有STM32的例程,还有STM8,51,arduino的都有,主流单片机的例程几乎全覆盖,非常友好!!!
打开之后,重启树莓派sudo reboot。

CAN诊断由发送端的请求与接收端的响应构成,诊断即为发送端与接收端数据往来。有的诊断一条消息完成,有的诊断需要多条消C息完成,毕竟在诊断中,一条 CAN 消息只包含 8 个字节长度。对于一条 CAN 诊断消息的分段发送问题,即为网络层需要讨论的内容。CanTp 层传输的报文分为 SF(单帧)、 FF(首帧)、 CF(连续帧)、 FC(流控帧) 4 类。
从图中可以看出,诊断服务属于 AutoSAR 服务层,诊断数据流通过CAN驱动CANIF 层 CANTP PDUR DCM 给到 DCM 模块,DCM 模块处理诊断数据,并执行对应的具体诊断服务。Diagnostic Communication Manager,诊断通信管理。实现具体的诊断协议,比如 UDS、 OBD。这里具体定义了各种不同的诊断服务,比如读取 ECU 故障码、写入 DID 数据等
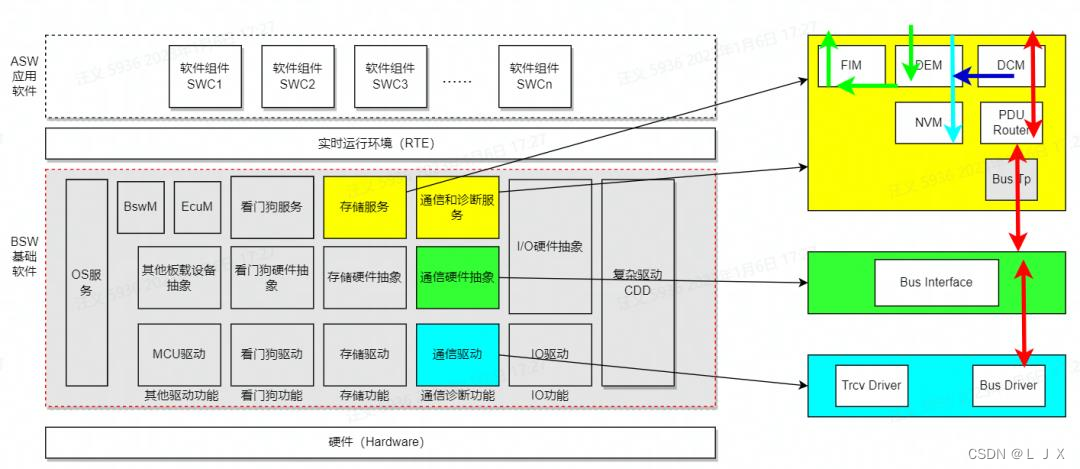
ECU上面除了主芯片MCU,还有很多外围设备,比如外置Flash,外置电源管理芯片等等。是对MCU 芯片的抽象和封装,由于Autosar Cp 是基于MCU 的软件架构,所以该层主要是实现MCU 外设驱动,比如I/O驱动、Flash 驱动、Can 驱动、看门狗驱动、定时器驱动等等。这里可以看到 BSW 主要提供了:看门狗服务 ,存储服务,通信和诊断服务,OS服务,I/O 功能,BswM 和 Ecu
STM32内部建立一个缓存(共128*8个字节),每次修改的时候,只是修改STM32上的缓存(实际上就是SRAM)OLED即有机发光管(Organic Light-Emitting Diode,OLED)。OLED显示技术具有自发光、广视角、几乎无穷高的对比度、较低功耗、极高反应速度、可用于绕曲性面板、使用温度范围广、构造及制程简单等有点,被认为是下一代的平面显示屏新兴应用技术。OLED显示和传统
