- @ZhuanShangNiDeXin
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
华为云ModelAtrs创建GPU环境训练模型个人博客网站创建Notebook首先需要创建新的Notebook然后根据自己的训练需求选择要创建的镜像和规格。我这里选择mindspore的GPU进行创建,规格选择64GB的。如果要选择SSH远程开发的话需要填写这个密钥对,没有的话选择点击立即创建之后就按照它的要求走就行。添加数据存储点击添加数据存储。如果没有并行文件系统,就选择新建并行文件系统。创建
Atlas200DK环境配置个人博客网站dd镜像安装推荐使用dd镜像安装环境,这种方式更快更方便。直接去网站下载需要版本的dd镜像,然后利用Etcher烧录到sd卡中就行。参考链接:Atlas 200DK样例速跑_哔哩哔哩_bilibili更方便的200DK合设环境搭建方法——dd镜像_Atlas 200 DK_昇腾论坛_华为云论坛 (huaweicloud.com)MindSpore安装不推荐在
机器学习入门笔记前言这个是根据“黑马程序员”的一套机器学习课程编写的博客。这篇博客上的案例均为课程里面的,但并没有包含所有案例,只是记录了部分个人认为比较重要的部分。B站视频地址文章目录机器学习入门笔记前言特征工程Tf-idf文本特征提取Tf-idf介绍Tf-idf的重要性无量纲化处理---标准化为什么我们要进行标准化?定义API标准化总结PCA降维什么是主成分分析(PCA)API分类算法数据集划
机器学习入门笔记前言这个是根据“黑马程序员”的一套机器学习课程编写的博客。这篇博客上的案例均为课程里面的,但并没有包含所有案例,只是记录了部分个人认为比较重要的部分。B站视频地址文章目录机器学习入门笔记前言特征工程Tf-idf文本特征提取Tf-idf介绍Tf-idf的重要性无量纲化处理---标准化为什么我们要进行标准化?定义API标准化总结PCA降维什么是主成分分析(PCA)API分类算法数据集划
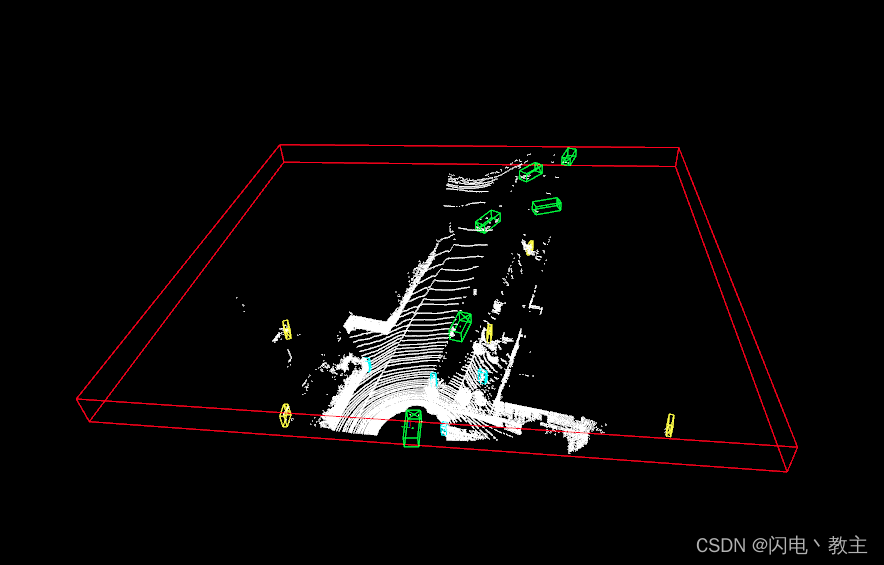
OpenPCDet训练三维目标检测方法
详细介绍ChatGLM3大模型本地部署的方式及使用方法!!!
超级详细的python-sc2环境的介绍,帮助读者实现自己的星际争霸2游戏AI智能体!!!

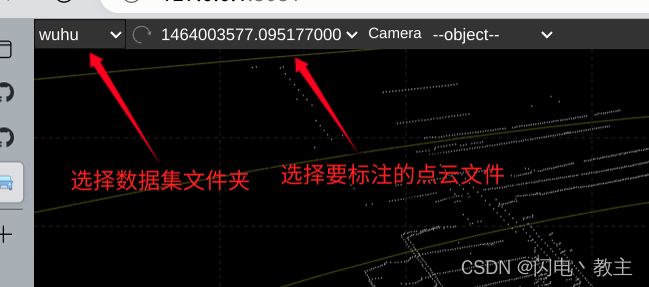
选择这个3D框,可以在左侧三个不同视图下调整方框的大小和位置。r ==> 逆时针旋转同时自动调整box大小f ==>顺时针选择同时自动调整box大小。可以按住Ctrl,使用鼠标左键选中点云,可以进行快速框选。3/PageUP ==> 前一帧点云4/PageDown ==> 后一帧点云。鼠标右键选择New,可以看到预定义了许多标注类别,这些标注类别可以在。1 ==> 前一个box2 ==> 后一个b
循迹智能小车 循黑线文章目录循迹智能小车 循黑线硬件菜单硬件使用硬件组装程序设计前的理解程序代码硬件菜单单片机型号:STC16F40K1284路红外循迹模块小车底盘套件(一个底盘、两个TT马达、两个轮胎)12V航模电池降压模块A4950双路电机驱动杜邦线等硬件使用关于4路红外循迹模块的使用教程,我之前写过一篇博客,里面有详细的介绍。如果有不会的可以先去浏览学习一下。跳转至教程A4950双路电机驱动
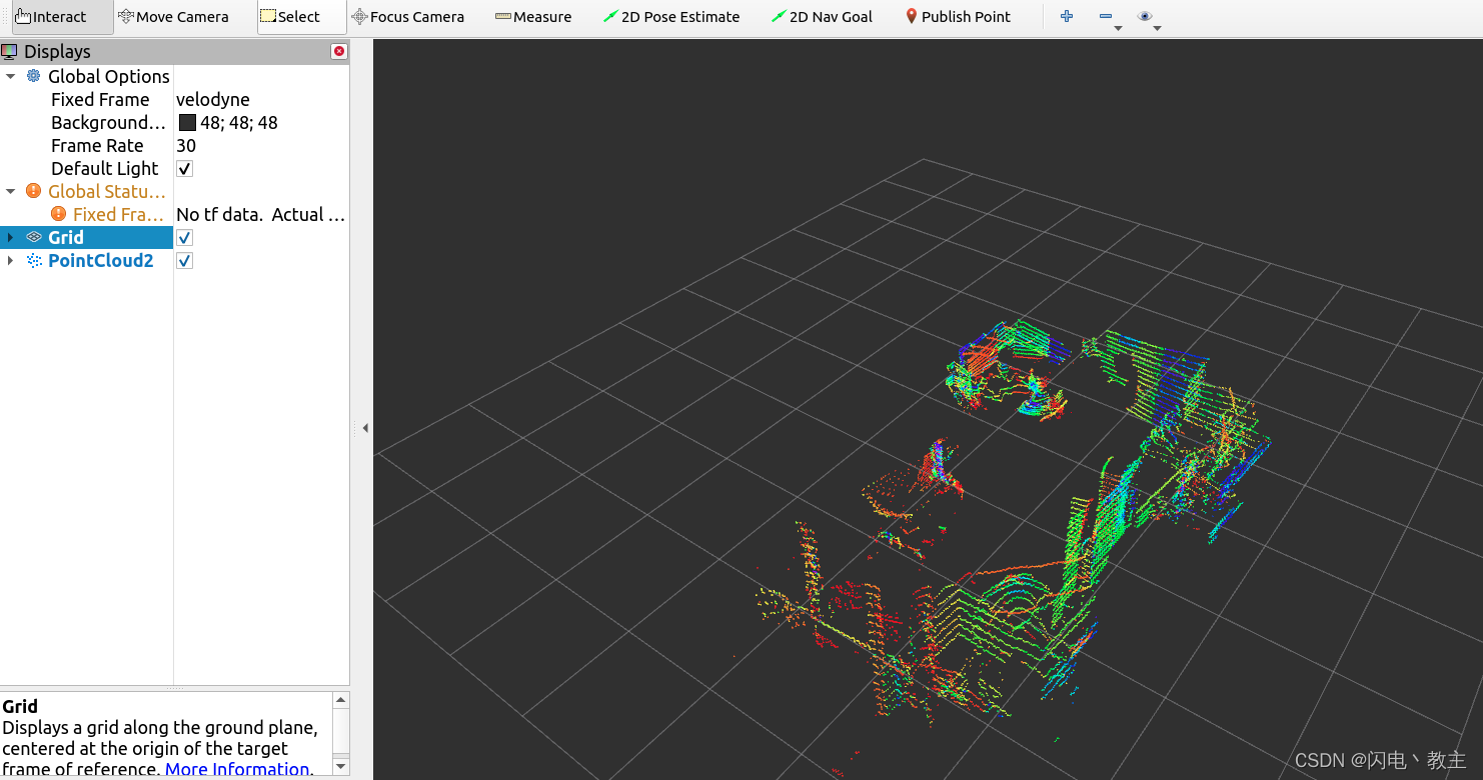
需要将激光雷达与PC连接,然后在设置=>网络=>有线中将IPv4改为手动,并且地址为,子网掩码为,点击应用。然后在浏览器输入192.168.1.201,如果成功进入配置界面则表示连接成功。