- @ZKIzsqqAGf
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
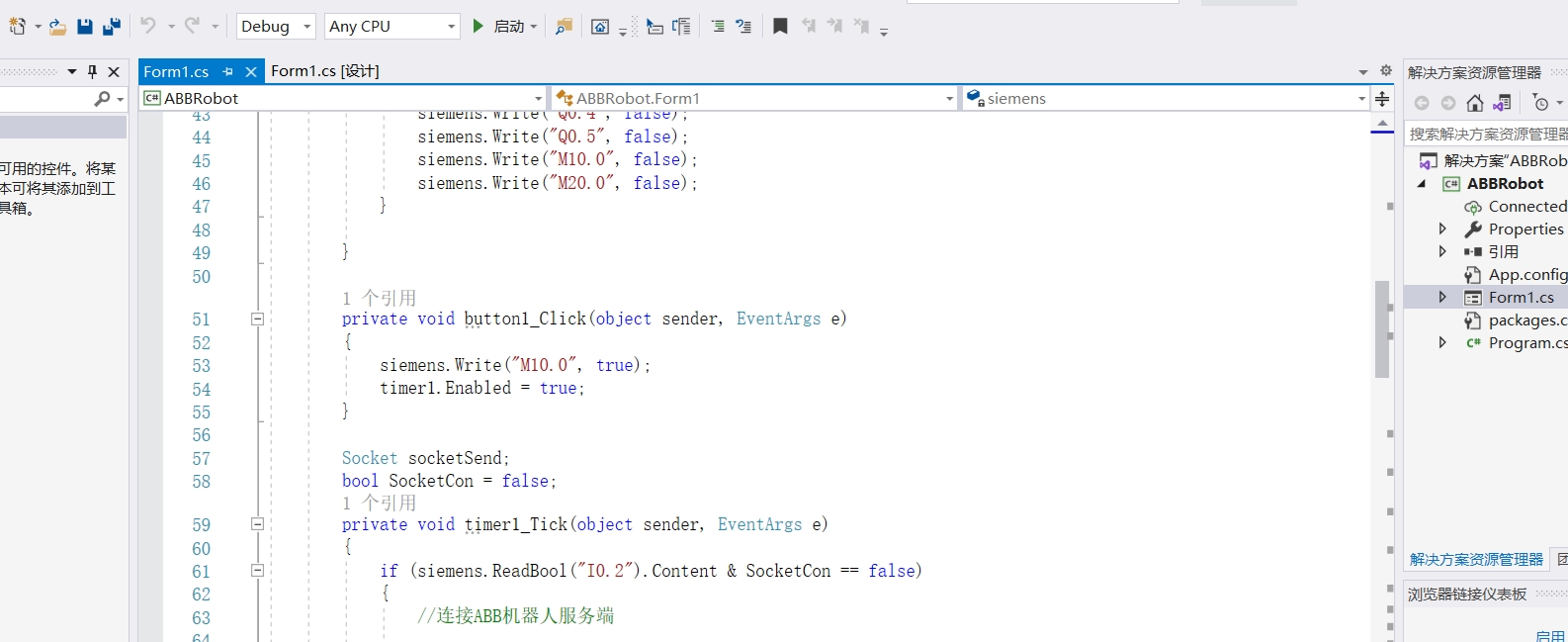
自己写的程序,也能给大伙提供部分,要是有小伙伴想自己提升学习,研究研究这个案例,说不定能收获不少呢。从ABB机器人的运动指令控制,到上位机和机器人、PLC的以太网通讯,这一套流程下来,对自动化控制这块的理解又能上一个台阶。最近搞了个项目,用到了 ABB 蜘蛛机器人,顺带把 PLC 和 C# 上位机通讯啥的都整明白了,今儿个就来给大伙唠唠。再说上位机和机器人以及 PLC 的通讯,摒弃了传统的 IO
整套代码已经在GitHub开源(假装这里有链接),包含HLS源码、Vivado工程和Python驱动,拿回去就能直接烧录到PYNQ板子上开玩。想在FPGA上跑YOLO?最后说点实在的,这个方案最大的价值不是性能多炸裂,而是展示了如何用Python+FPGA的混合开发模式快速验证算法。整套方案支持HDMI实时显示,插个USB摄像头就能用,下面咱们拆开看看怎么实现的。实测在100MHz时钟下,单个卷积
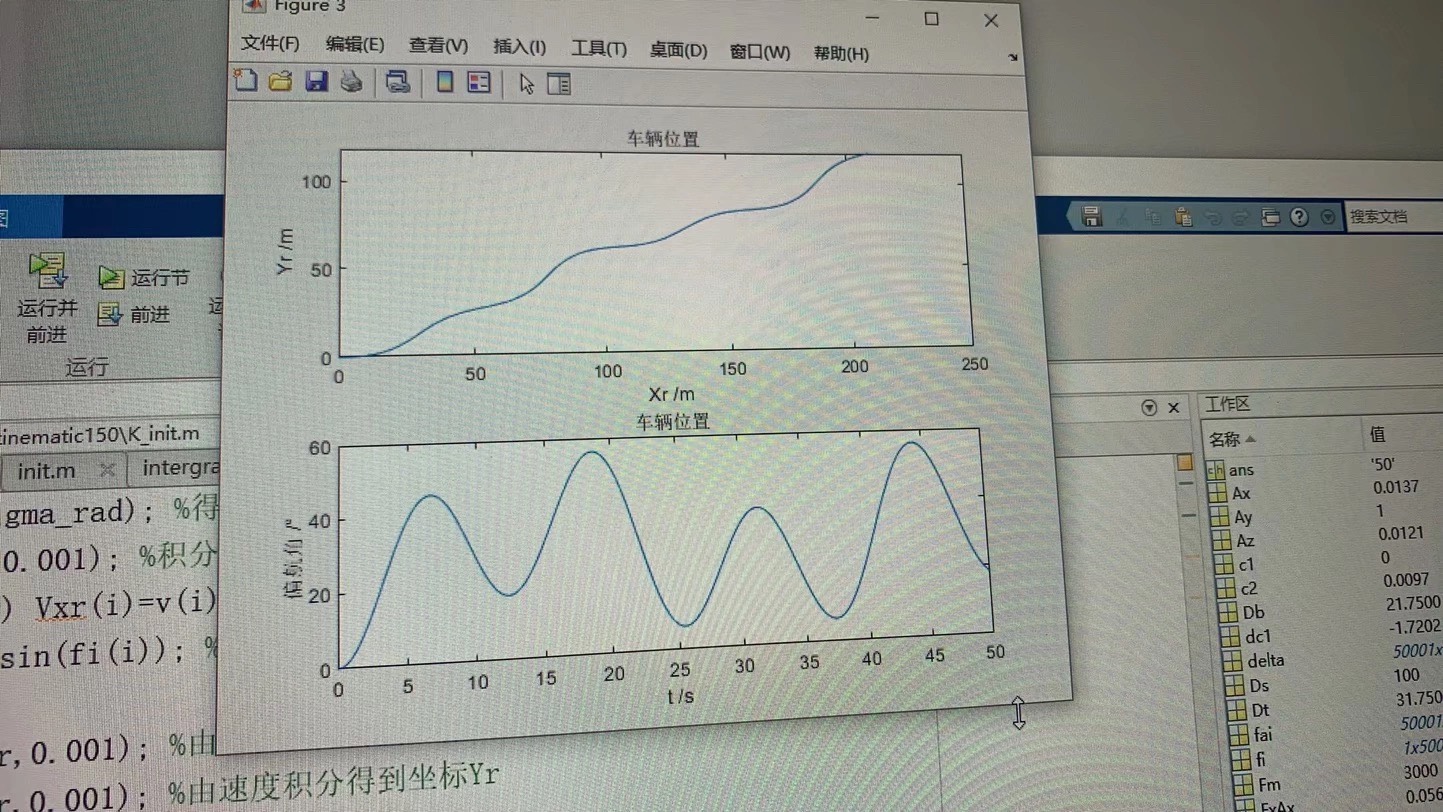
本高压直流输电系统在线监测控制系统基于MATLAB/GUI开发,以CIGRE HVDC标准测试系统为仿真载体,旨在实现高压直流输电系统的实时监测、仿真控制及数据可视化分析。系统依托Simulink/SimPowerSystem工具搭建电磁暂态仿真模型,通过自定义编写的“.m”程序实现仿真模型调用、运行数据采集、图形化展示及控制参数配置等核心功能,为高压直流输电系统的稳态与暂态特性分析提供一体化解决
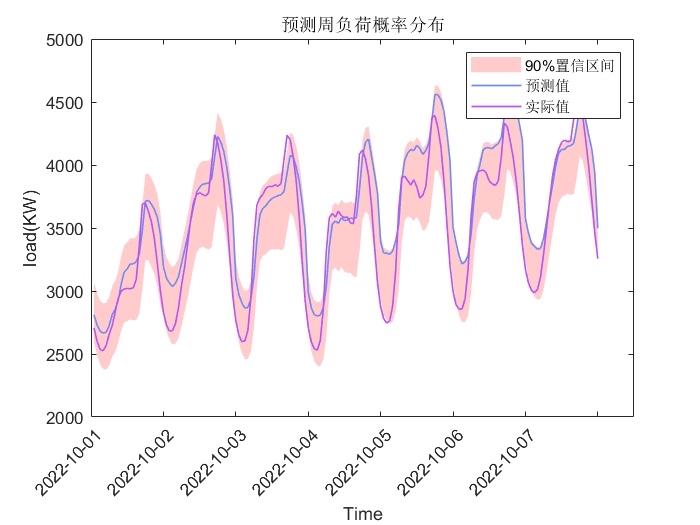
这个方法主要用于处理多个特征输入,最终输出单个特征的预测结果,并且通过分位数回归实现区间预测。它结合了BiLSTM强大的序列建模能力和分位数回归对不同分位点的预测优势,能够更全面地捕捉数据的特征和趋势📈。
不过要提醒的是,输出端并的TVS管千万别省,型号得选SMBJ26CA这种双向的,矿井下的电磁干扰可比实验室猛多了。最近有个24W DC-DC本安电源的项目,反激拓扑加双重保护的设计方案,让我想起了当年在矿井下调试设备被电火花吓出冷汗的经历。但先说清楚啊,原理图上的参数都是实打实调出来的,自己魔改搞炸了可别找我哭。基于反激变换器的矿用本质安全性电源,输出端设有两级保护,符合最小燃点要求,有过压过流保

自动驾驶多传感器联合标定系列之毫米波雷达到车体坐标系的标定工程 , 本商品对毫米波雷达的偏航角yaw进行标定,分为粗略标定、静态目标识别和曲线拟合三个步骤。这个工程带有代码注释,帮助您对标定算法的的理解和学习。实实在在的工作经验总结在自动驾驶领域,多传感器联合标定是至关重要的一环,尤其是毫米波雷达到车体坐标系的标定。今天就来跟大家分享下我在这个标定工程里,对毫米波雷达偏航角yaw标定的实战经验。

当相位响应曲线在2Hz处出现急剧变化时,就该检查悬架阻尼是不是设成香肠厂的参数了(别笑,真有人把Ns/m写成Ns/mm)。这种肾上腺素飙升的操控体验,在CarSim和Simulink的联合仿真环境里只需要几行代码就能反复重现。但千万别忽视作动器的速率限制——实测超过15%/s的油门变化会让传动系统模型出现数值震荡,就像手动挡车油门踩猛了那种顿挫感。有次忘记这个设定,导致生成的轨迹图车辆像是在跳街舞
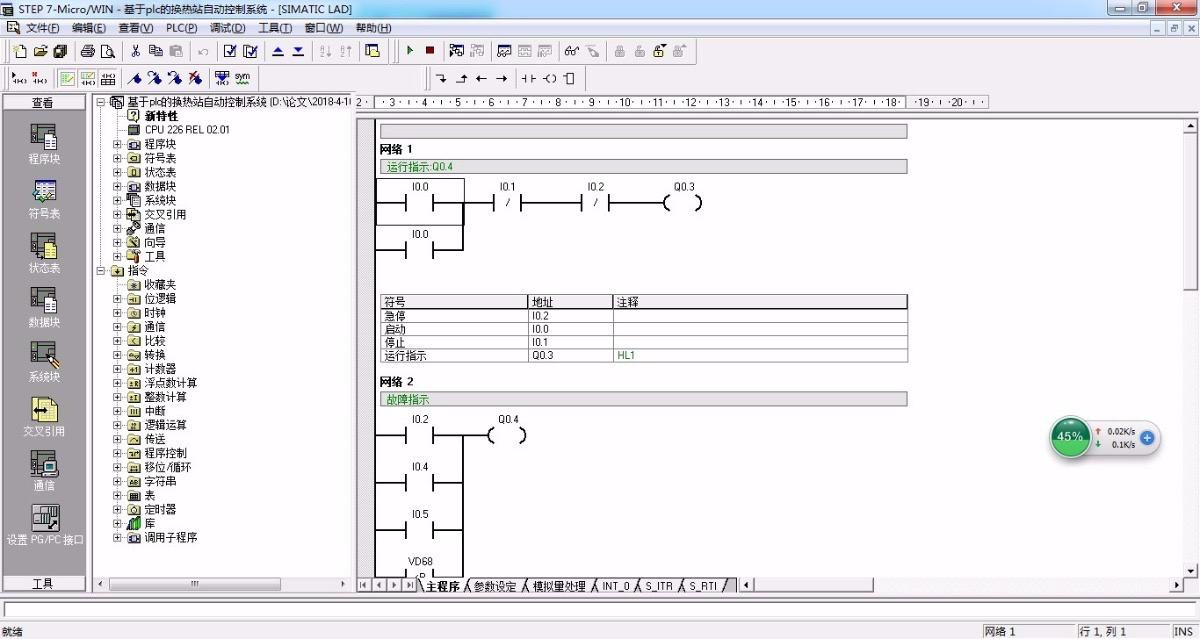
基于PLC的换热站自动控制系统设计换热站组态换热站带解释的梯形图程序,接线图原理图图纸,io分配,组态画面在现代化的供热体系中,换热站起着至关重要的作用,它就像是供热网络的“心脏调节器”,精准地调控着热量的输送与分配。而基于 PLC(可编程逻辑控制器)的换热站自动控制系统设计,更是为这一关键环节注入了智能与高效的基因。今天,咱们就深入聊聊这个有趣又实用的设计,包括换热站组态、梯形图程序、接线图原理
比固定参数VMD的包络熵平均降低37%,能量损失减少42%,关键模态分量还能准确捕捉到50Hz和120Hz的成分。最后说点坑:Matlab 2018b之后的版本有个大坑——新版的VMD函数默认用L2范数优化,得改下内部参数才能兼容原来的算法。这段代码的亮点在于权重分配——给包络熵最大的话语权,让分解后的信号尽可能平滑。优化参数为模态个数和二次惩罚项,目标函数为三中信号评价指标,最新算法,要求201
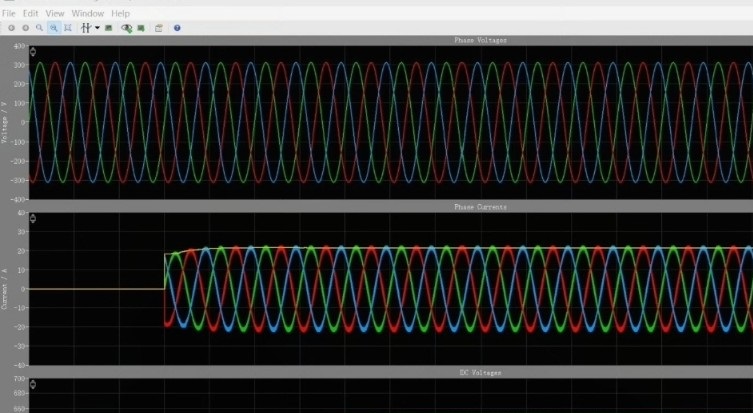
通过采用SPWM调制方式和电压电流双闭环控制方式带前馈的控制策略,本模型实现了对电力系统的有效控制和稳定输出。本文将介绍在plecs(Power Electronics Control Simulation)仿真软件中建立的三相六开关PFC模型,并详细阐述其平均电流调制方式为SPWM及电压电流双闭环控制方式带前馈的控制策略。在plecs版本8.2的仿真环境中,我们成功构建了该模型,并通过仿真得到了