
写文章




- @Xiong2840
简介
该用户还未填写简介
擅长的技术栈
未填写擅长的技术栈
可提供的服务
暂无可提供的服务
yolov3的训练(一)下载与训练
yolov3的训练(一)对darknet的下载与布置失败的记录
ORB-SLAM2的布置(四)ORB-SLAM2构建点云
高博的工作是对基本 ORB SLAM2 的扩展,基本思想是为每个关键帧构造相应的点云,然后依据从 ORB SLAM2 中获取的关键帧位置信息将所有的点云拼接起来,形成一个全局点云地图。
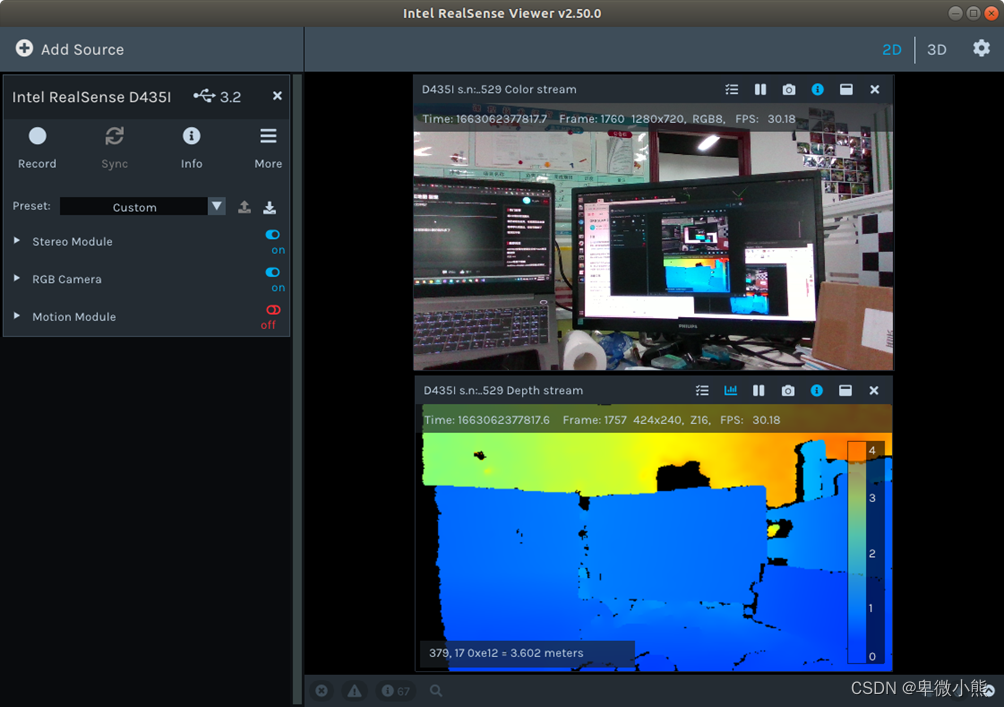
ORB-SLAM2的布置(五)使用 intel D435i 构建SLAM点云地图
Intel RealSense SDK 2.0 是跨平台的开发套装,包含了基本的相机使用工具如 realsense-viewer,也为二次开发提供了丰富的接口,包括 ROS,python , Matlab, node.js, LabVIEW, OpenCV, PCL, .NET 等。在启动相机之前,我们需要设置一下 realsense2_camera rospack 中的 rs_camera.la
到底了