- @WuXiaoMuDeBug
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
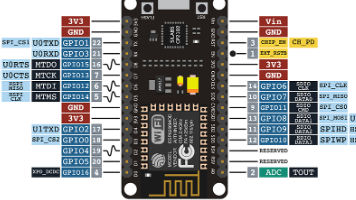
本文介绍了ESP8266模块常用的AT指令集,分为基础查询、WiFi配置和网络通信三类。基础指令包括通信测试、版本查询、IP地址获取等;WiFi配置指令涵盖工作模式设置、热点连接/断开、AP模式配置等;网络通信指令涵盖TCP/UDP连接建立、数据传输、服务器模式设置及透传模式切换等操作。每个指令均说明格式、参数要求和典型应用场景,为ESP8266模块的网络功能开发提供实用参考。

摘要:本文介绍使用ESP32控制42步进电机的实现方法,通过A4988驱动器实现90度正反转运动。核心内容包括:1)硬件连接配置(使能、脉冲和方向引脚定义);2)电机参数设置(200步/圈、细分设置);3)优化的加减速控制算法(包含加速、匀速和减速三个阶段);4)代码实现细节(角度转步数计算、速度曲线生成等)。该方法有效解决了步进电机启动/停止时的卡顿问题,并通过串口输出调试信息。程序执行一次90
本文提供Arduino-ESP32开发环境的安装指南。需从指定网址下载修复文件,并将所有文件解压替换至本地Arduino15目录下的staging/packages文件夹。开发板管理器地址为Espressif官方提供的JSON链接。完成文件替换后,通过Arduino IDE进行安装即可。操作路径为:C:\Users[用户名]\AppData\Local\Arduino15\staging\pack
本文介绍了OLED显示屏的软件I2C驱动实现,主要包含以下内容:1) GPIO配置步骤,定义SCL和SDA引脚;2) 通过宏定义实现I2C通信的基本操作(起始/停止信号、数据读写);3) 提供OLED控制函数,包括初始化、清屏、显示字符/数字/字符串和图片等功能;4) 优化了数据传输方式,支持连续命令/数据发送。该驱动支持多种字体大小,实现了对SSD1306 OLED屏幕的完整控制功能。
摘要:全国大学生电子设计竞赛本科组题目侧重高频信号处理、精密控制系统及多设备协同,典型题目包括四旋翼UV光控导航、射频频谱监测、电能质量分析等,需使用FPGA、频谱仪等专业设备。高职高专组题目难度较低,侧重基础控制应用,如超声波避障小车、环境参数测量、摄像头目标跟踪等,主要采用单片机、传感器等基础器材。两组题目均注重实际工程能力培养,本科组更强调系统复杂度和精度要求。(149字)
该代码实现了一个基于MSP430的舵机控制系统,主要功能包括:1. 通过PWM信号精确控制两个舵机角度(setAngle和setAngle1函数);2. 使用串口通信接收X/Y轴控制指令;3. 实现平滑移动算法(smoothMove),使舵机运动更平缓;4. 主循环根据串口接收的偏移量实时调整舵机角度。系统还包含LED指示灯和按键中断处理功能,适用于需要精确控制舵机运动的嵌入式应用场景。
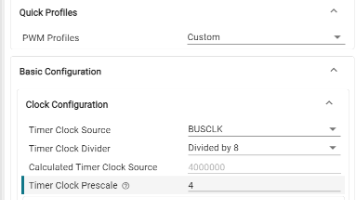
摘要:配置PWM时需将计数模式改为向上计数,由于TIMG时钟不可分频,需改用高级计时器TIMA。开发环境为Keil。针对不同舵机(180°/270°/360°),需调整PWM参数:50Hz频率下,占空比对应不同角度(如2.5ms脉冲对应180°舵机270°),且转速随方向变化,向下逆转加速,向上顺转加速。参数修改时注意区分舵机类型。
摘要:该文介绍了一种时钟编码器的读取方法,通过判断TIM计数方向(__HAL_TIM_IS_TIM_COUNTING_DOWN)来调整累计值,顺时针旋转时(0)减少计数器值,逆时针(1)时增加。使用__HAL_TIM_GET_COUNTER获取当前计数值,每次旋转约1-2个计数。可通过__HAL_TIM_SET_COUNTER将计数器重置为0,用于判断单次旋转的计数变化。该方法直接操作定时器寄存器
摘要:文章指出CubeMX生成的代码与RTThread的函数存在冲突,解决方法是在main.h文件中进行相应修改,然后在main.c中重新引用修改后的main.h文件即可解决冲突问题。该方法通过调整头文件引用顺序和内容来消除函数命名冲突。
嘉立创示例需放入SDK目录运行syscfg.bat,该示例支持Keil和CCS开发环境。用户需将示例代码放置在指定位置,通过执行配置文件来启用相关功能。该示例为开发者提供了两种主流IDE(Keil和CCS)的适配方案,便于在不同开发环境中快速测试和使用。运行syscfg.bat可完成必要的环境配置,确保示例程序能够顺利编译和调试。