- @TICPSH
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
当前新能源汽车产品蓬勃发展,为了能够帮助客户快速的建立满足Autosar和功能安全需求的整车控制器,缩短客户开发时间,上海工业控制安全创新科技有限公司联合旗下工作室企业上海革路电子科技有限公司,开发了VCU的参考设计。针对整车控制器的整体方案,基于PowerPC架构的车规级MCU SPC574K72为核心辅以高度集成的U-chip L9788芯片,帮助客户快速构建整车控制器系统。硬件资源方面,除.
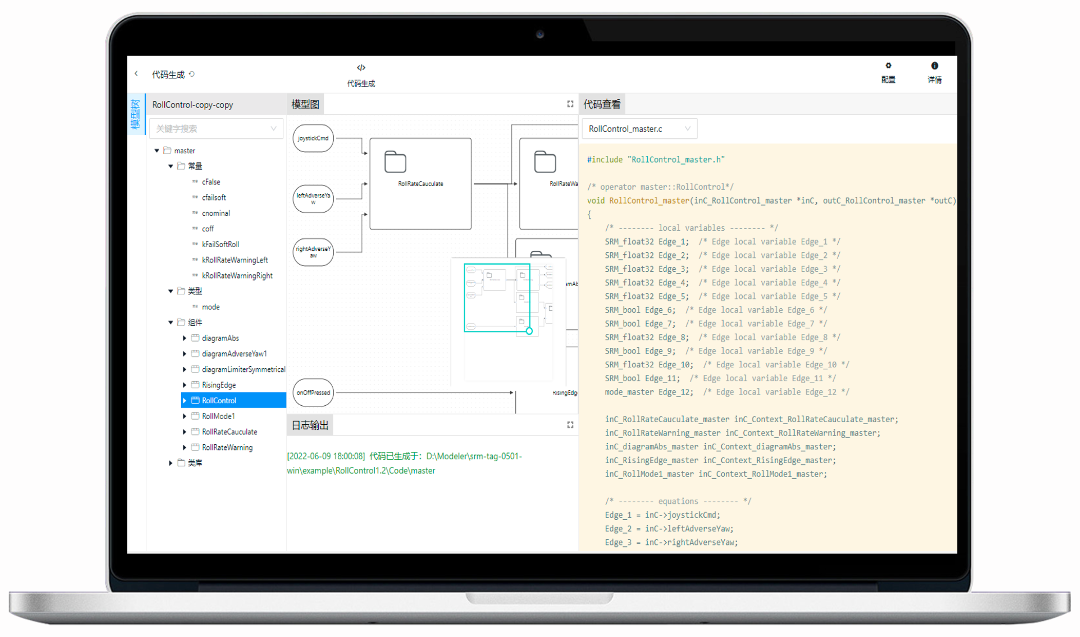
该工具支持嵌入式软件模型的设计与开发,能够从系统需求出发,为用户提供基于Lustre模型语言的图形化建模、模型静态检查、模型仿真与调试、模型在环测试、C代码自动生成等丰富便捷的功能。从而为高安全性应用系统的软件开发人员提供一套完整的基于模型的开发解决方案,以此降低开发成本、缩短开发周期、减少开发风险。相较于传统的编码开发流程,Modeler基于模型的可视化建模开发,可以覆盖嵌入式开发的整个流程,从
单元测试是整个软件开发过程中的一个重要环节 ,执行一个完备的单元测试方案能够提高整个开发过程的时间效率,确保软件的实际功能与详细设计说明的一致性,使软件开发的效率和软件产品的质量得到最好的保障 。什么是单元测试?单元测试(unit testing),是指对软件中的最小可测试单元进行检查和验证。通常而言,一个单元可能是单个程序、类、对象、方法等。为什么要做单元测试?软件中存在的错误发现得越早,修改和
本文将深入探讨SmartRocket Modeler的核心功能之一——图形化建模,详细阐述它如何将复杂、抽象的系统需求,转化为直观、精确、无二义性的可视化模型,从而为构建高可靠性的嵌入式软件奠定坚实的基础。通过提供丰富而精确的建模元素、灵活的设计方式以及强大的模型管理能力,SmartRocket Modeler帮助工程师将错综复杂的嵌入式软件需求,转化为清晰、无二义性、可验证、可执行的模型。这个模

Modeler提供的构件库包含数学构件、比较构件、数组/结构体构件、逻辑构件、位构件、时态构件、分支构件、条件块构件、状态机构件和高阶构件等,支持数据流和状态机建模,全面对标SCADE Suite建模算子。嵌入式控制软件是嵌入式系统的重要组成部分,在航空航天、轨道交通、核能电力、汽车电子等安全攸关领域的重要性尤为突出,一旦出现故障,其造成的损失无法接受。为应对这一挑战,上海控安研发了。在实际运行中
本文研究了白盒异常检测在自动驾驶入侵检测系统中的应用。通过发现有意义的特征并建立正常行为的精确模型,这项工作建立自动驾驶入侵检测系统中的检测引擎迈出了第一步。
单元测试是整个软件开发过程中的一个重要环节 ,执行一个完备的单元测试方案能够提高整个开发过程的时间效率,确保软件的实际功能与详细设计说明的一致性,使软件开发的效率和软件产品的质量得到最好的保障 。什么是单元测试?单元测试(unit testing),是指对软件中的最小可测试单元进行检查和验证。通常而言,一个单元可能是单个程序、类、对象、方法等。为什么要做单元测试?软件中存在的错误发现得越早,修改和
本文提出了一种新的基于边缘计算的方法来重建丢失的全球定位系统信号。基本思想是在边缘节点收集信息,并使用它们来交叉验证从卫星接收的全球定位系统信号。
对于现今的自动驾驶汽车来说,由于传感器的增加和感知网络等软件的存在,使得自动驾驶汽车在信息安全上相较于其它汽车更为脆弱。自动驾驶汽车信息安全的脆弱性来源于两个方面:传感器的脆弱性和神经网络的脆弱性。
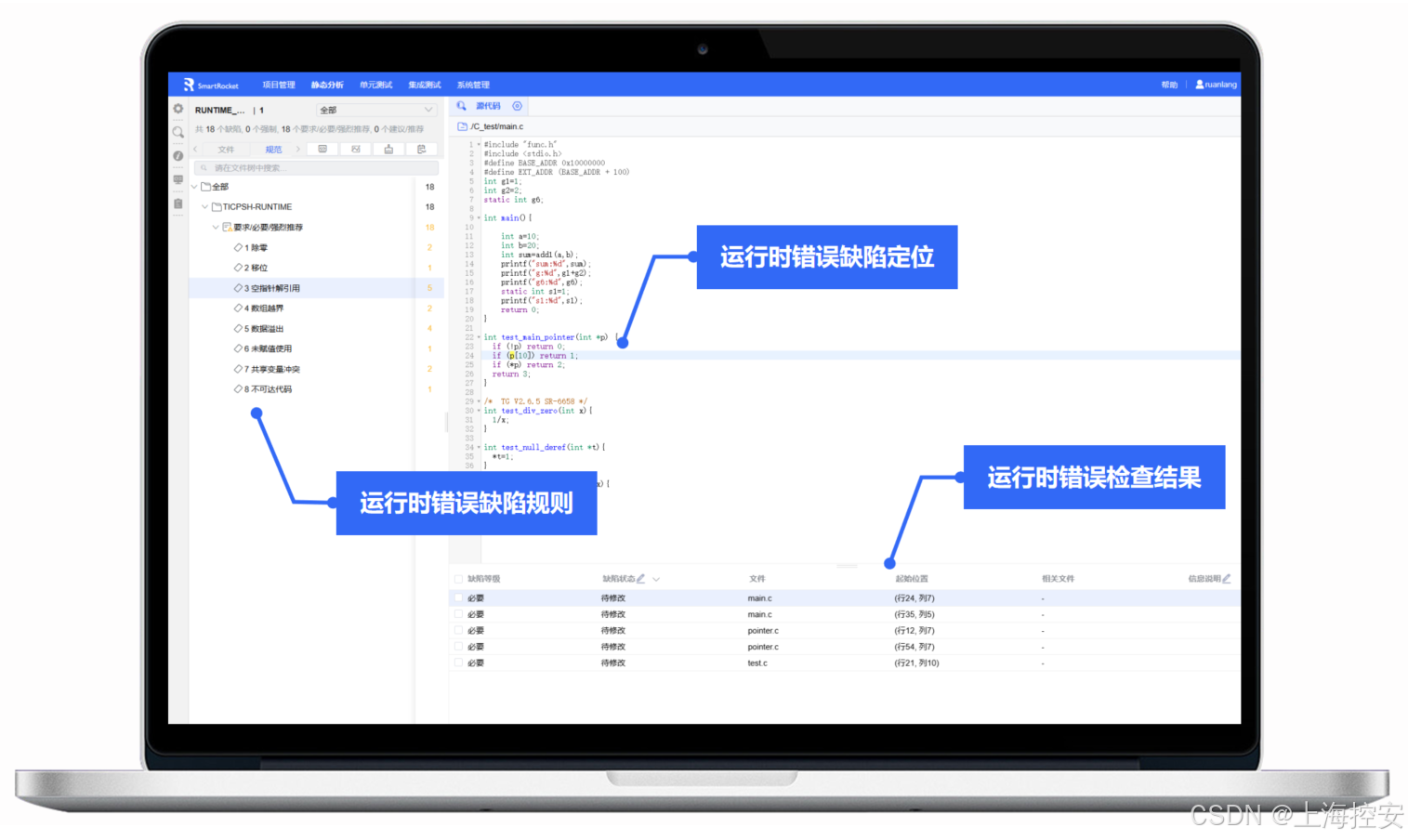
SmartRocket TestGrid嵌入式软件自动化测试平台是专为C/C++设计的静动态代码分析工具,本次新增动态缺陷检测功能模块采用形式化验证技术提前识别除零、移位、空指针解引用、数组越界、数据溢出、未赋值使用、共享变量冲突、不可达代码等运行时错误缺陷,支持MISRA等国际编码规范进行代码合规质量度量,提供精准错误定位和修复建议,显著缩短修复周期,降低风险成本。工具基于形式化验证理论,将代码