
写文章




- @Squandered
简介
该用户还未填写简介
擅长的技术栈
未填写擅长的技术栈
可提供的服务
暂无可提供的服务
ubuntu配置深度学习环境Anaconda+cuda+cudnn+torch+tensorflow
(1)官网下载(2)网盘下载提取码: qmem。

ubuntu20.04安装ROS
二、直接安装ROS(暂时懒得写,以后一定写,据说小鱼安装的会缺少某些包但是暂时还没出什么错误)键入1,回车(ubuntu20.04的ROS版本是noetic,18.04是melodic)roscore后出现上面则安装成功。添加bashrc环境。
Ubuntu20.04换源+安装网卡驱动(解决ubuntu新安装无网络)
链接: https://pan.baidu.com/s/1O-vOhSpSJaW0-M3qG61Zjw?(5)重启电脑(我有时候是重启之后还是没有,去做别的回来之后就有网了,不知道为什么。1、打开sources.list(没有网络需要先用手机数据线给电脑供网)其他源可以自行去相应网站搜索sources.list,一样的步骤。1、下载对应版本的网卡驱动,我的是e1000e-3.8.4。2、解压包并在

ubuntu配置深度学习环境Anaconda+cuda+cudnn+torch+tensorflow
(1)官网下载(2)网盘下载提取码: qmem。
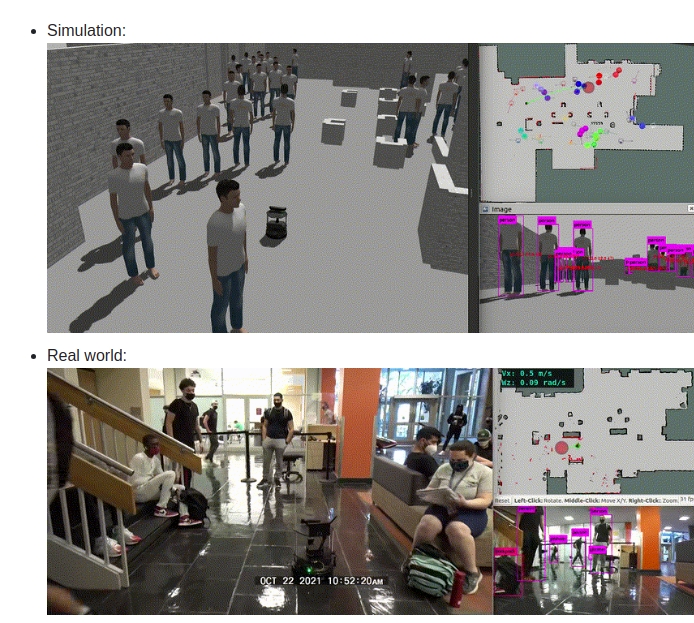
DRL-VO复现 密集人群和静态障碍物导航(仿真+现实部署)
DRL-VO 控制策略是一种新颖的基于学习的控制策略,对新环境具有很强的通用性,使移动机器人能够在充满静态障碍物和密集行人人群的空间中自主导航。该策略使用输入数据的唯一组合来生成所需的转向角和前进速度:激光雷达数据的简短历史记录、有关附近行人的运动学数据和子目标点。该策略在强化学习设置中进行训练,使用奖励函数,该函数包含一个基于速度障碍物的新术语,以指导机器人主动避开行人并朝着目标移动。
到底了