- @OCKHrYfK
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
STM32 是意法半导体推出的一系列 32 位 ARM 架构微控制器,性能强大、资源丰富,广泛应用于各种嵌入式项目,咱们这个智能家居设计就靠它来挑大梁。
comsol声子晶体建模文件教程,带隙计算,传输损耗计算在声学领域,声子晶体凭借其独特的声学特性,如同一个神奇的声学“过滤器”,引起了众多研究者的关注。而 Comsol 作为一款强大的多物理场仿真软件,为我们研究声子晶体提供了有力的工具。今天就来跟大家详细分享下如何利用 Comsol 进行声子晶体建模,并计算其带隙和传输损耗。

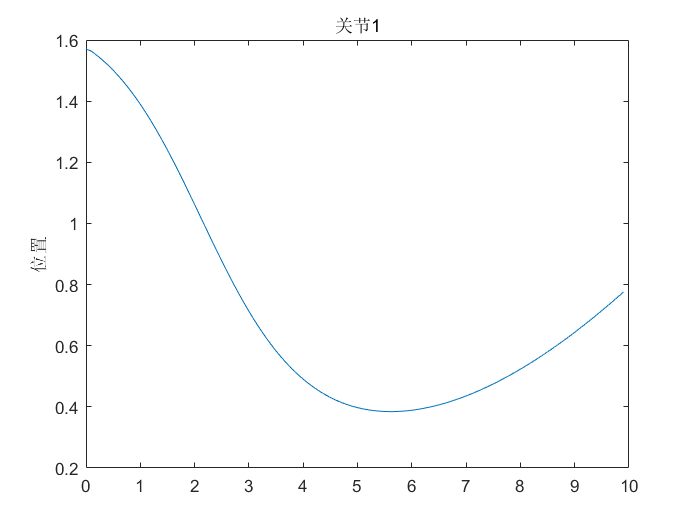
六轴机器人轨迹规划是一个复杂而有趣的问题,它涉及到运动学、动力学、控制理论等多个领域的知识。通过合理选择规划空间(关节空间或笛卡尔空间)、使用合适的方法(如Slerp)进行姿态插补,以及结合实际应用中的工具(如ROS和MoveIt!),我们可以实现一个高效且可靠的轨迹规划系统。希望这篇文章对你理解六轴机器人轨迹规划有所帮助!
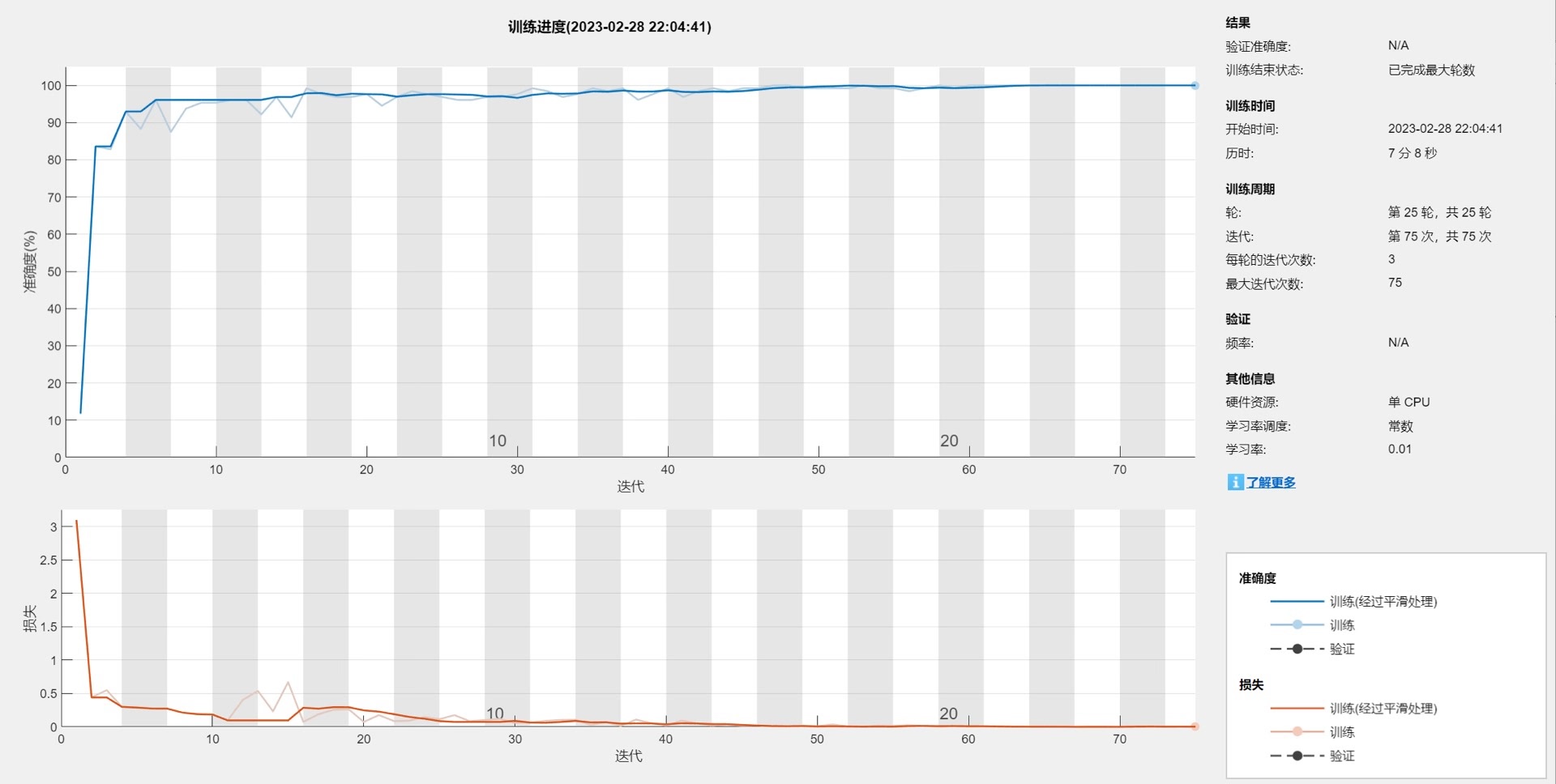
深度学习 5层CNN代码实现图片分类训练集共有9个文件夹代表9类,每类有50张图片,可根据需要自行准备训练集MATLAB代码,代码注释清楚,容易上手温馨提示:联系请考虑是否需要,(Example_7)在深度学习领域,卷积神经网络(CNN)是图片分类任务中极为常用且强大的模型。今天咱就用MATLAB来实现一个5层CNN做图片分类,数据集有9个类别,每个类别50张图片。
STM32 是意法半导体推出的一系列 32 位 ARM 架构微控制器,性能强大、资源丰富,广泛应用于各种嵌入式项目,咱们这个智能家居设计就靠它来挑大梁。
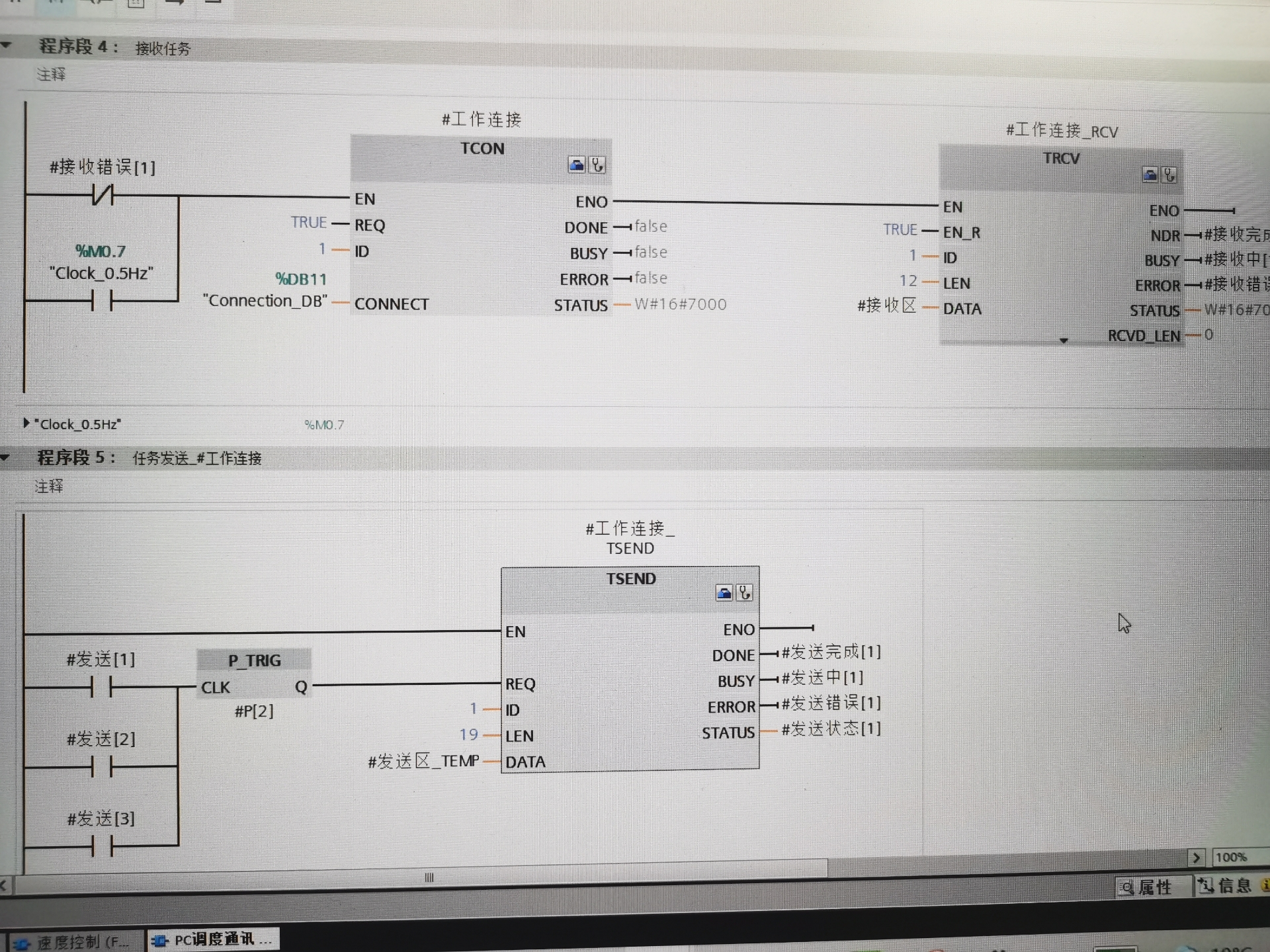
仓储物流摆渡车程序,博途1200程序,与上位机TCP通讯,赠送SCL学习资料。自制编码器定位,多位置处理,模拟量调速,采用SCL与梯形图混编,结构化编程框架,在仓储物流的自动化进程中,摆渡车扮演着重要角色。今天就来聊聊基于博途1200的仓储物流摆渡车程序开发那些事儿,还会免费赠送SCL学习资料哦,别错过!
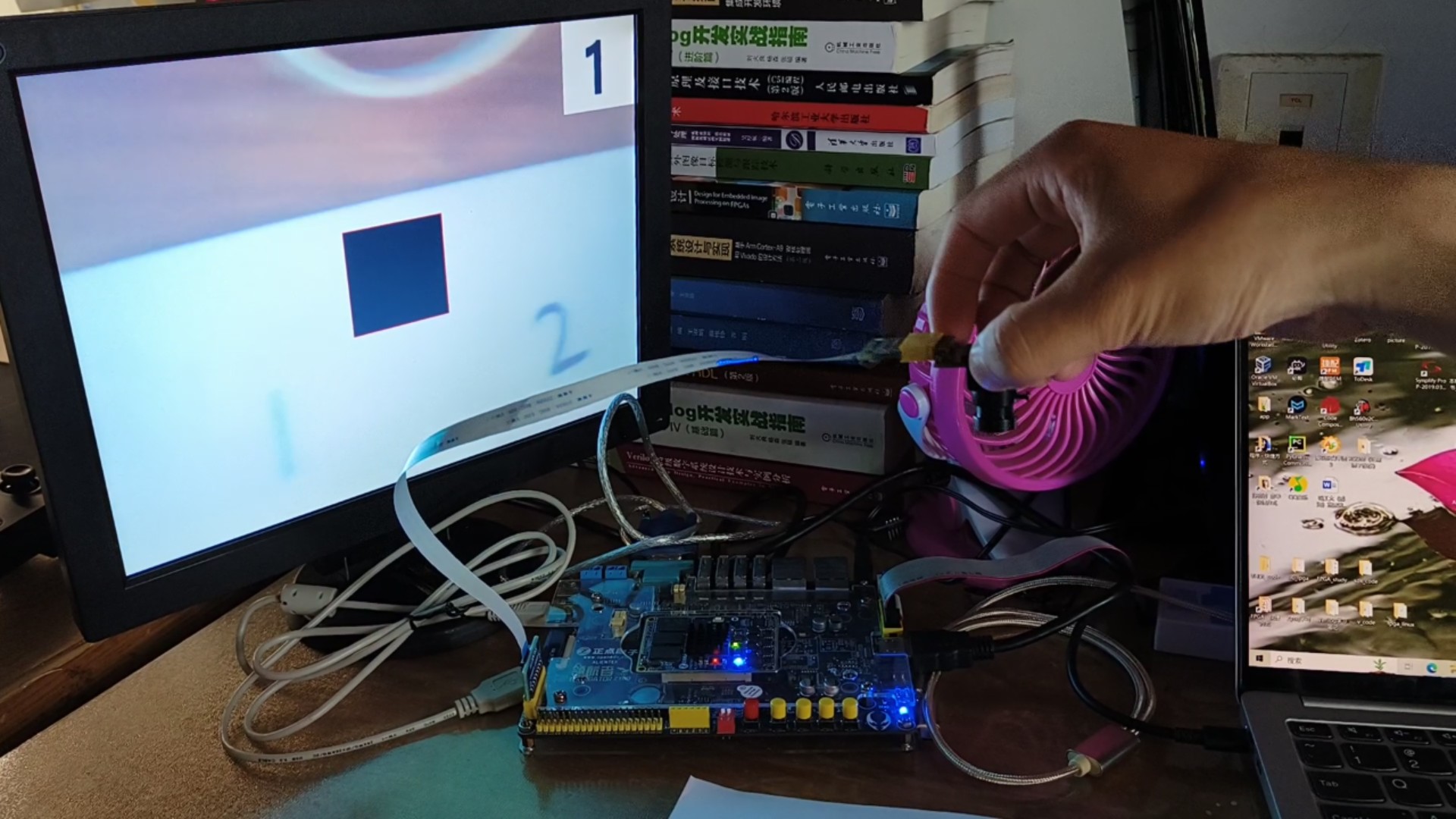
工程移植到其他板子时,最烦人的是摄像头和显示屏的引脚分配。从OV7725摄像头抓图到HDMI实时显示,FPGA和ARM两个核心分工明确得就像火锅店前厅后厨的配合——一个管火候,一个管摆盘。这行代码里的魔法数字可不是随便凑的,77、150、29这三个系数是人眼对不同颜色敏感度的量化值,比简单取平均讲究多了。在此工程的基础上,可以适配到正点原子的其他开发板上,也可以继续在FPGA端加速卷积神经网络。在
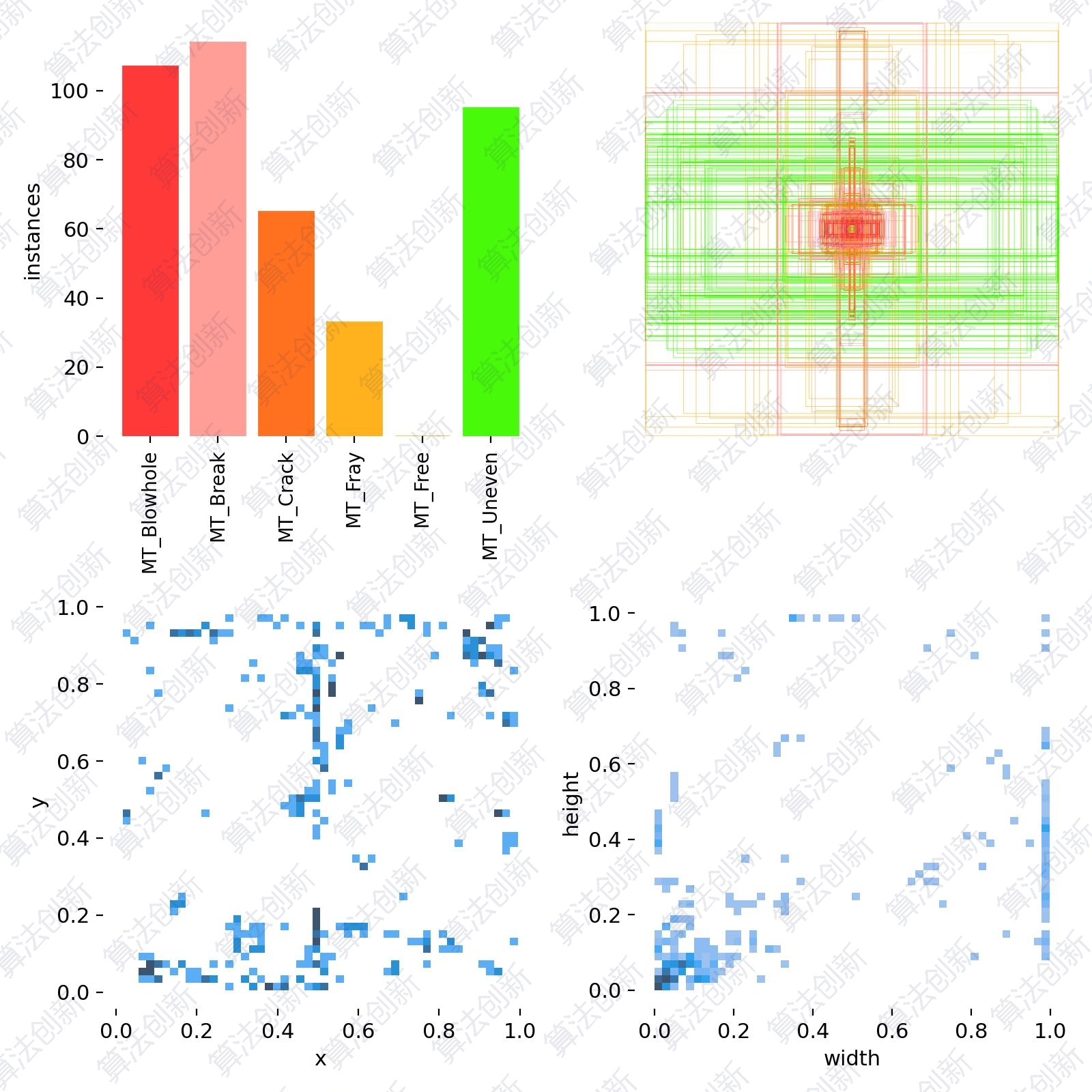
DL00237-基于YOLOv8深度学习的磁瓦缺陷检测含完整数据集实验结果磁瓦作为汽车发动机中电机的重要零件,其表面缺陷的检测在生产过程中非常关键。在当前的工业生产环境中,磁瓦表面缺陷的检测大多数仍然依靠人工检测,效率低下且漏检率高。使用yolov8进行检测,具有更高的精确性和稳定性。在汽车发动机电机的生产链条里,磁瓦虽小,却承担着举足轻重的角色。它作为电机的关键零件,其表面质量直接关乎电机性能。
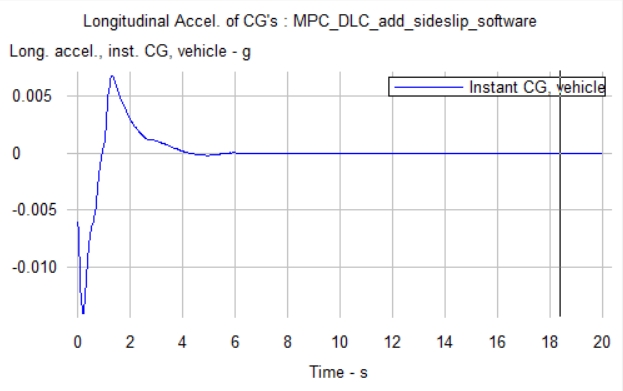
举个栗子,横向位移从0变到3米,纵向速度保持20m/s,起终点加速度都得是零。最近在调车辆横向控制时发现,用五次多项式做换道轨迹配合MPC真是香!今天咱们就抛开复杂的公式推导,直接上代码实战,聊聊怎么用Matlab和CarSim搞联合控制。生成曲线类似S型,加速度连续不会让乘客晕车。基于模型预测控制(mpc)的车辆换道,车辆轨迹跟踪,换道轨迹为五次多项式,matlab与carsim联防控制。基于模
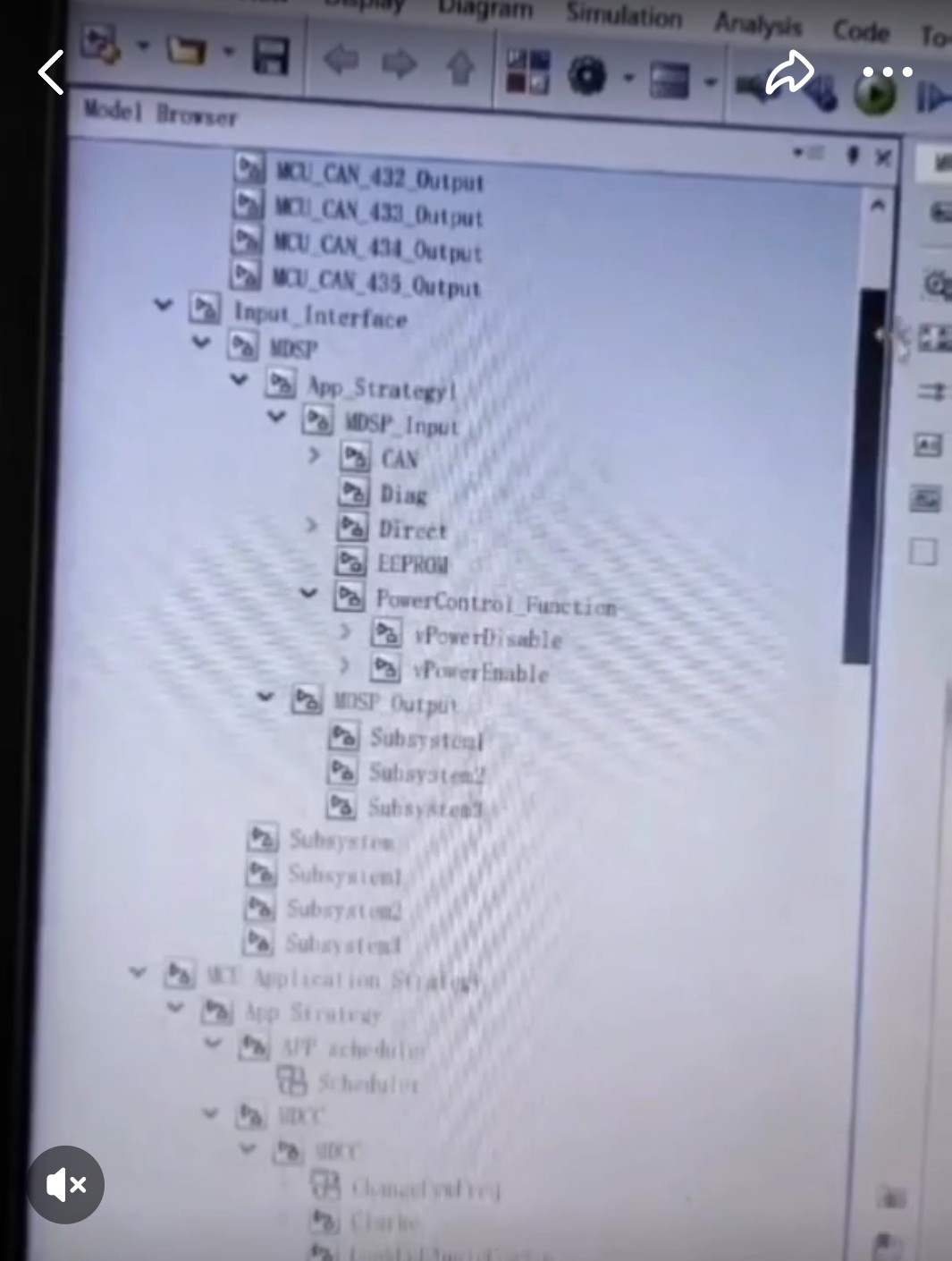
基于MBD开发的电动汽车主驱电机控制器模型及开发资料,量产模型及代码 ,有完整的需求文档,算法说明,接口文档,软件架构说明。Sumlink MCU电机控制策略 svpwm AUTOSAR 自动代码生成 c语言 嵌入式系统 INCA CANAPE A2L标定在电动汽车领域,主驱电机控制器无疑是核心部件之一。基于模型的设计(MBD)方法为其开发带来了诸多优势,今天就和大家唠唠基于MBD开发的电动汽车主