




- @NVIDIA_Community
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
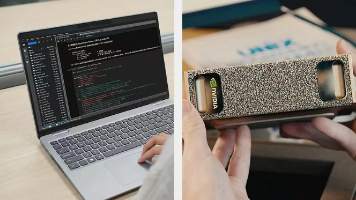
依托 NVIDIA DGX Spark 高性能算力平台,鼓励各参赛团队突破技术边界,打造具备感知、理解、自主创作与迭代优化能力的 AI 智能体,探索 Agent 在内容生产、自动化工作流、多模态创意场景下的创新落地实践。机会有限,先到先得!线上训练营正在火热招募中,参训伙伴可以全程跟进赛事进程,免费学习 NVIDIA DLI 技术课程,获得官方结课证书,并与参赛队伍一同开展技术交流、共同学习成长。
在未改变其他超参数的情况下,由于训练吞吐量提升,训练时间从单 GPU 的 1.3 天压缩至 4 GPU 的 12.5 小时,这对于需要反复迭代超参数、快速验证新策略的研究人员而言,是一次具有变革意义的效率跃升。Isaac Lab-Arena 目前是 alpha 版本,后续版本将重点支持更具智能体特征、以提示词优先的场景与任务生成,增强并行评估中的异构性,以及加入敏感性分析和视觉语言模型(VLM,

评估AI模型与评估AI智能体密切相关,但两者回答的问题截然不同。模型基准测试衡量的是基础模型的能力,例如理解语言、遵循指令或解决静态任务的能力;而智能体评估则关注端到端系统的行为,包括规划、调用工具、处理不确定性,以及在动态环境中完成实际工作流程的表现。本文将解释模型和智能体评估之间的主要区别,并介绍将 AI 智能体作为生产系统进行评估的五个实用技巧。这种评估方法侧重于轨迹、工具和结果,而不仅仅是
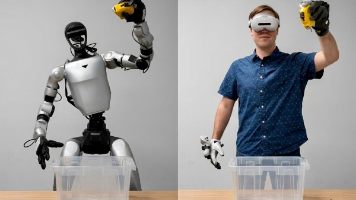
这一合作旨在解决大规模机器人数据采集的瓶颈,通过 PICO 先进的 XR 硬件与 NVIDIA Isaac 开放机器人开发者平台的深度融合,为全球机器人开发者提供一套标准化、高保真的数据生产管线。针对上述痛点,借助 NVIDIA CloudXR.js SDK,PICO 4 Ultra 能够无缝接入 NVIDIA Isaac 远程操控工作流,无论是面对现实中的实体机器人,还是虚拟仿真环境里的机器人,
NVIDIA CUDA 13.3 为整个 CUDA 生态系统的开发者带来了新功能和性能优化。通过在 C++ 中引入,支持基于 Tile 的高级内核开发,能够自动管理复杂的底层 GPU 细节,从而实现卓越的性能和可移植性。此外,CUDA Tile 编程现在不仅支持所有其他已支持的 GPU 架构,还新增了对计算能力 9.0(NVIDIA Hopper)GPU 的支持。我们还将发布 CUDA Pytho
NVIDIA 深度学习培训中心(DLI)提供的《构建基于大语言模型的应用》 AI 培训班即将开课,由 NVIDIA 认证讲师全天实时中文授课和答疑,配合云端实验环境的动手实操帮助每位学员深入理解 LLM 应用开发并积累实践经验,从而快速投入实际开发工作。无论是个人技能跃升还是团队能力建设,NVIDIA 深度学习培训中心(DLI)的生成式 AI 认证学习路径都能为您提供系统支撑 —— 从认证科目选择
无论您是刚开始了解认证,还是已经购买了考试券准备报名,本文可助您更高效完成从选科到考试的全流程。在考试过程中,如遇到考试设备、考试环境或流程相关问题,DLI 现场工作人员可即时协助解决,避免考生自行与英文在线监考官沟通可能带来的不便,帮助您更加顺畅、专注地完成考试。考试券购买成功后,您将收到 dlichina 邮箱发出的考试券,预约流程说明,以及考前准备。现场考试会从考试前、考试中到考试后全程提供
NVIDIA 深度学习培训中心(DLI)提供的《利用提示工程构建大语言模型应用》AI 培训班即将开课,由 NVIDIA 认证讲师全天实时中文授课和答疑,配合云端实验环境的动手实操,系统讲解并实践提示工程一系列基本技能,用于高效构建基于 LLM 的应用。使用由 Llama-3.1 LLM 驱动的 NVIDIA NIM,和当前流行的 LangChain 库,学习使用提示工程一系列基本技能,用于构建基于
我们使用 GRPO 算法在 Qwen3-8B-Base 模型上运行结果,在部署中应用 FP8,在训练中应用 BF16。虽然对复合错误引起的 KV 缓存和注意力进行量化时,不匹配 KL 差异稍高一些,但我们的方法可以减轻不稳定性。通过启用词元-level 截断重要性采样,用于线性* KV 缓存* 注意力的 FP8 可实现与 BF16 基准和线性层 (W8A8) 的 FP8 的验证准确性对齐。图 6.

AI 和 AR 通过提供超个性化的数字体验 (从虚拟尝试到 AI 驱动的造型) ,正在改变美感和时尚。Perfect Corp. 是 AI 和 AR 美颜技术的全球领导者,利用 NVIDIA 解决方案提高其应用程序的真实感、准确性和性能。Perfect Corp. 使用通过 NVIDIA TensorRT 优化的 AI 模型,能够实现高精度的实时皮肤护理分析和 AI 生成的发型。此外,NVENC
