




- @HUASHUDEYANJING
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
深度学习过程就是优化一个函数。
一、版本选择Ubuntu 18.04+python3.7+CUDNN 8.2.0+CUDA11.3+TensorRT8.2+Pytorch1.10.1+Tensorflow-gpu2.6RTX3060只能在CUDA11.1以上调用二、安装1、cuda11.3安装链接CUDA Toolkit 11.3 Downloads | NVIDIA Developer如果之前你已经安装好了nvidia 驱动,
长方体表示长宽高、中心点、朝向、类别思路先检测后分类。
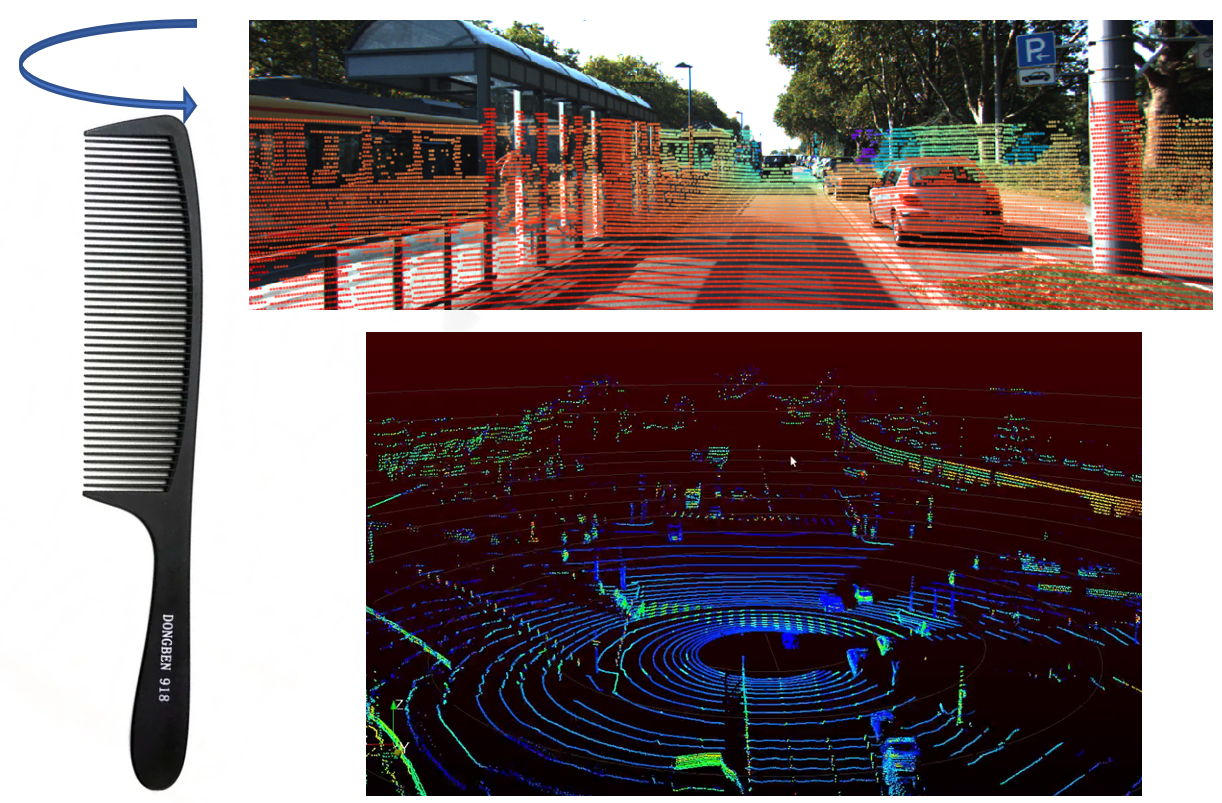
SLAM的全称是Simultaneous Localization and Mapping即时定位与地图构建,为解决机器人自主导航的问题。人在一个未知的环境下也不知如何行进,我们闭着眼睛也不知道怎么走路,机器人如人一样,也需要一个“眼睛”与环境之间交互知道自己的位置,并且能够建立一个地图来让机器人自主导航。如下图所是,相机相当于我们的眼睛,激光雷达像是成千上万个很长的拐棍去勘测障碍物,地图相当于我
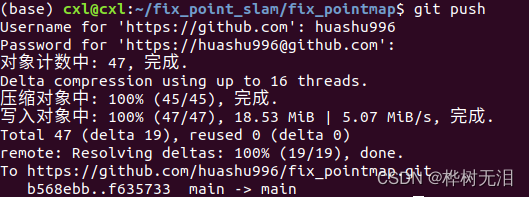
这一步是为了之后的上传,提交代码遇到的问题remote: Support for password authentication was removed on August 13, 2021.
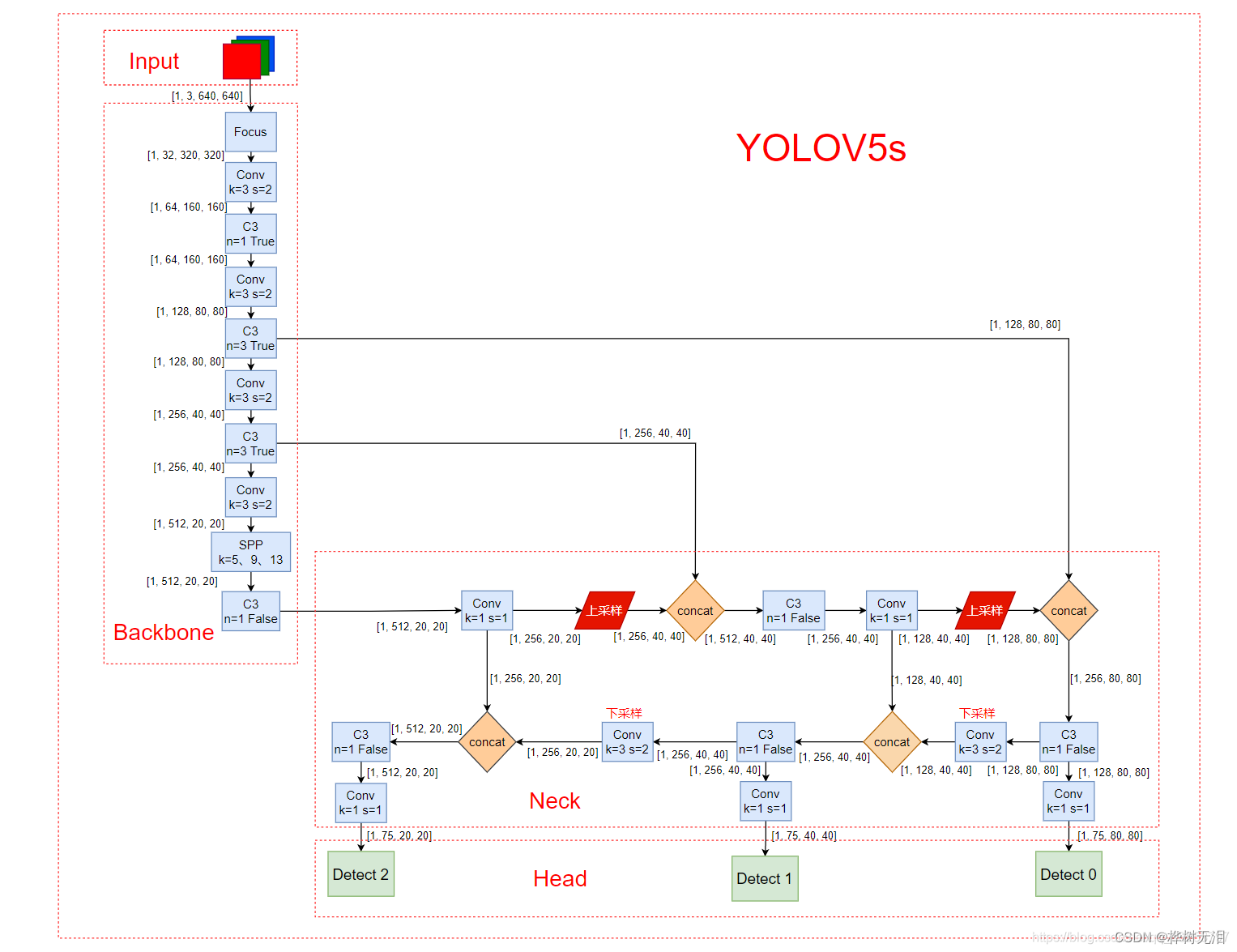
利用多个小卷积核替代一个大卷积核,先将channel 数减小再扩大(默认减小到一半),具体做法是先进行1×1卷积将channel减小一半,再通过3×3卷积将通道数加倍,并获取特征(共使用两个标准卷积模块),其输入与输出的通道数是不发生改变的。Focus模块的作用是对图片进行切片,类似于下采样,先将图片变为320×320×12的特征图,再经过3×3的卷积操作,输出。32,最终变为320×320×32
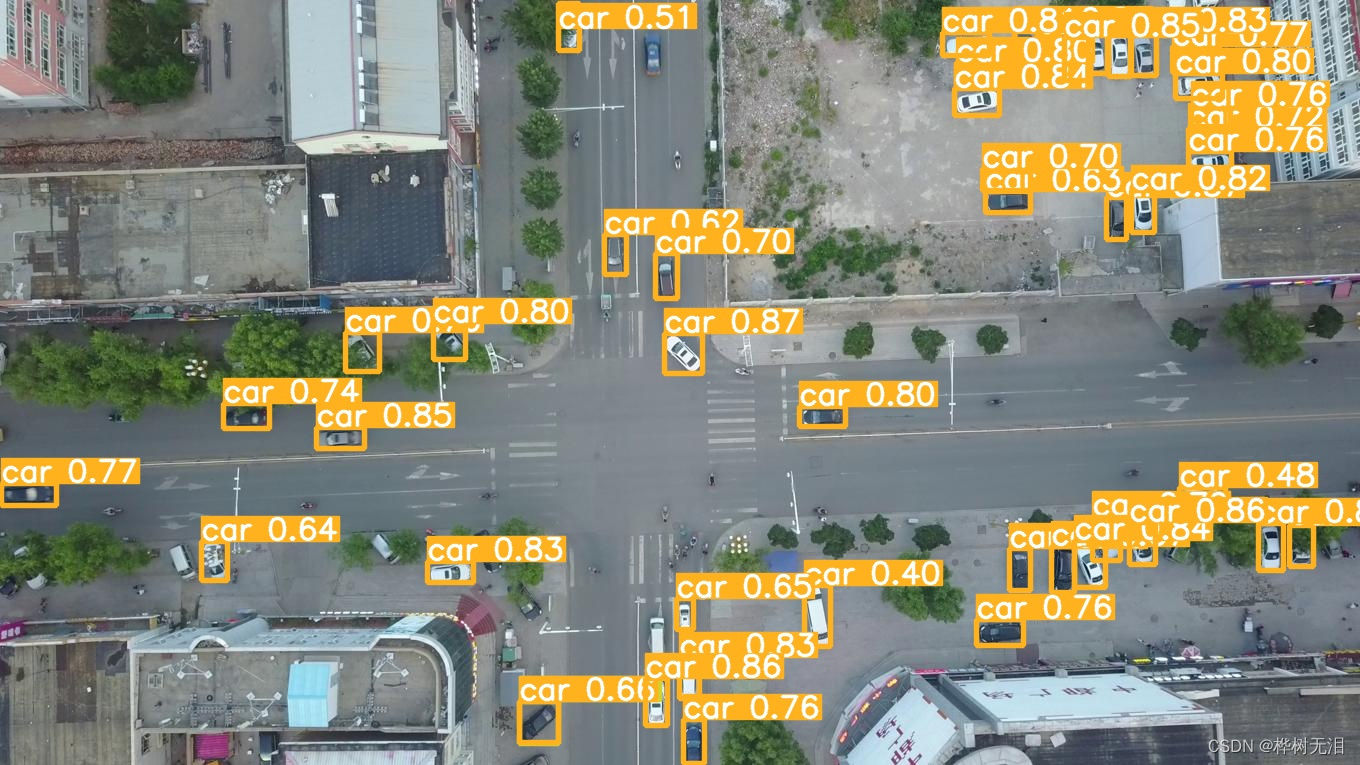
代码】工程(五)——小目标检测tph-yolov5。
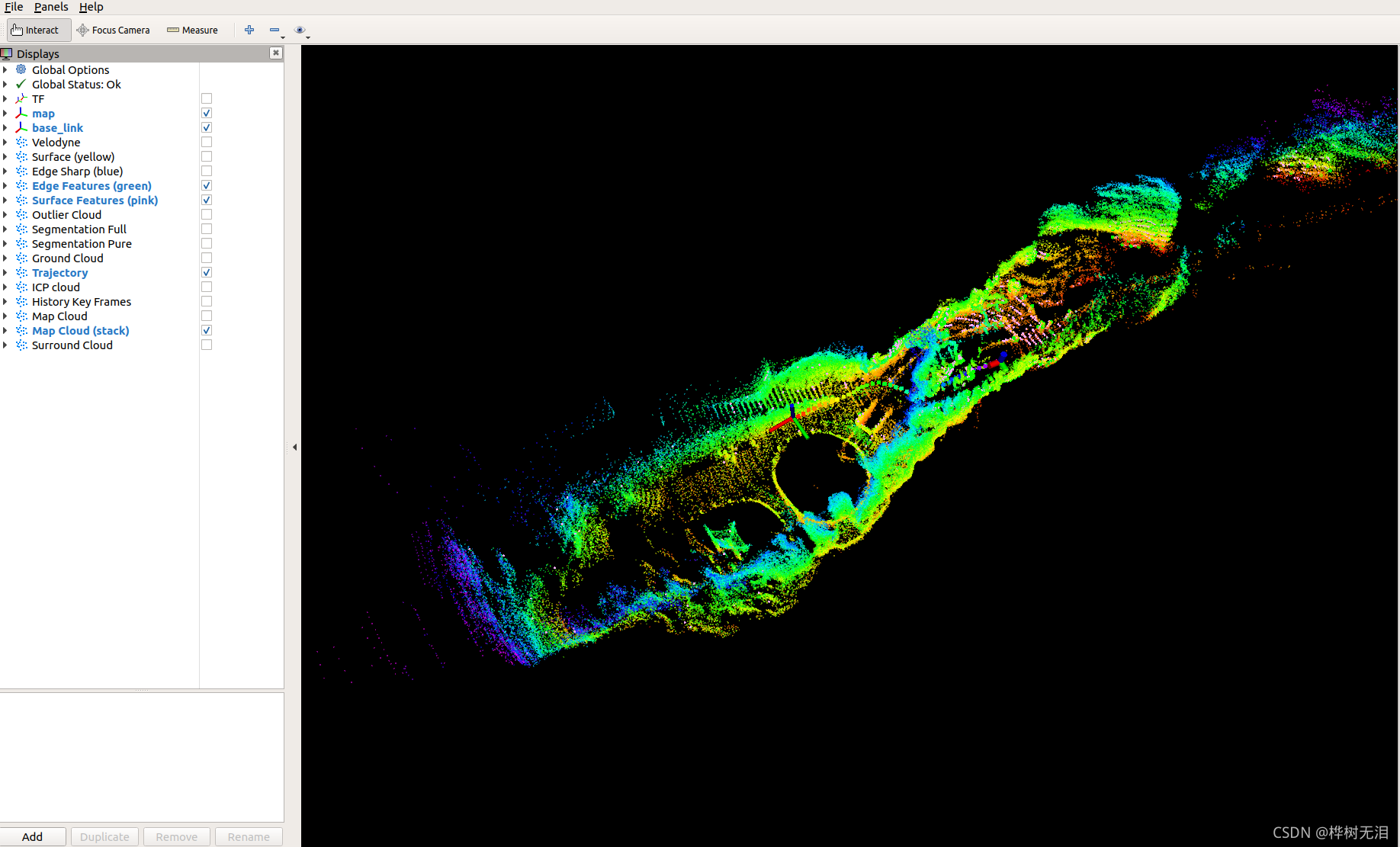
当第一次编译代码时,需要在“catkin_make”后面添加“-j1”以生成一些消息类型。将来的编译不需要“-j1”。编译时出现错误,找不到Cmake文件,则需要在路径中添加相应的环境变量。一定要加--clock时间,这样才能生成完整的全局地图。#下载编译Lego_loam。运行lego_loam程序。在代码建图过程中保存数据。utility文件修改。...
链接:https://pan.baidu.com/s/1kjHSec1N9jAnvSWE9wHwPQ提取码:87j4 pip install kitti2bag需要更改kitti2bag点云的强度信息,不然会出现如下情况 whereis kitti2bag将i改为intensity kitti2bag -t 2011_10_03 -r 0027 raw_syncedrosbag play kitt
回环检测只能消除一部分误差,不能消除全部误差。运用视觉用特征点描述子比较简单。