- @FRANKBANG
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
注意:kitti数据集的label都是基于相机坐标系的。如果使用雷达的label,需要进行相机和雷达之间的矩阵转换。label——真值,错错错。应该是数据帧————————帧值?比kitti数据集规模大,场景也更加丰富,白天,晚上,雨雪雾等天气。kitti中的中心点,都是底面中心点,而不是3Dbox的中心点。面相python的,是Open3D。点云稀疏,如果使用图像中卷积的算法,会造成大量的计算浪
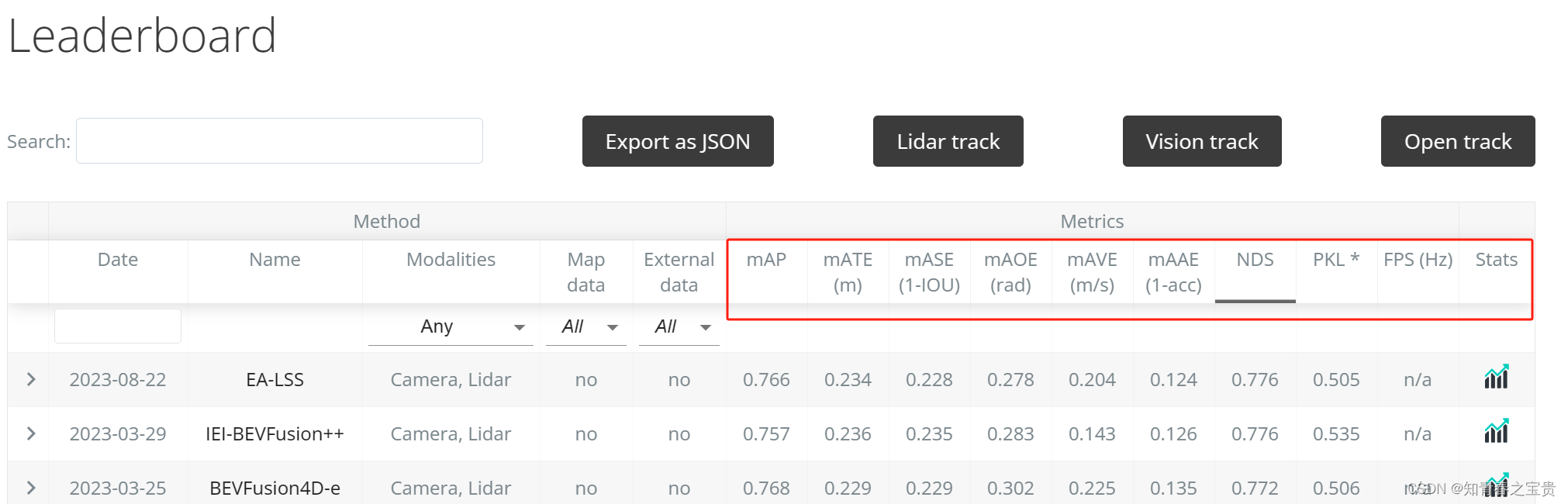
mAP(mean Average Precision)bev下2d中心点的距离来评价,而不是像2d检测里用iou来评价mATE(Average Translation Error)中心点的2D欧式距离mASE(Average Scale Error)中心点和朝向对齐后的尺度误差,1 - IOUmAOE(Average Orientation Error)朝向误差mAVE(Average Veloc
注意:kitti数据集的label都是基于相机坐标系的。如果使用雷达的label,需要进行相机和雷达之间的矩阵转换。label——真值,错错错。应该是数据帧————————帧值?比kitti数据集规模大,场景也更加丰富,白天,晚上,雨雪雾等天气。kitti中的中心点,都是底面中心点,而不是3Dbox的中心点。面相python的,是Open3D。点云稀疏,如果使用图像中卷积的算法,会造成大量的计算浪
Transformer由论文《Attention is All You Need》提出,现在是谷歌云TPU推荐的参考模型。论文相关的Tensorflow的代码可以从GitHub获取,其作为Tensor2Tensor包的一部分。哈佛的NLP团队也实现了一个基于PyTorch的版本,并注释该论文。在本文中,我们将试图把模型简化一点,并逐一介绍里面的核心概念,希望让普通读者也能轻易理解。Transfor

mAP(mean Average Precision)bev下2d中心点的距离来评价,而不是像2d检测里用iou来评价mATE(Average Translation Error)中心点的2D欧式距离mASE(Average Scale Error)中心点和朝向对齐后的尺度误差,1 - IOUmAOE(Average Orientation Error)朝向误差mAVE(Average Veloc
调试方式快捷键意义Step OverF8调试一行代码,不进入子函数;如果没有子函数,功能与Step Into一样Step IntoF7单步执行,进入子函数调试过程中想跟着代码一步步走下去,可以一只按F7(Step Into),有时就会调到源代码里去执行,此时通过Step Into My Code可以让debug回到自己的代码并继续向下执行Step OutShift + F8运行断点后面所有代码;当