- @CZlNFGPr
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
LabVIEW这种图形化编程在快速迭代时优势明显,上周刚给注塑车间加了AGV调度模块,从原型到上线只用了三天。设备管理模块更刺激,同时要和五台不同型号的PLC通信。整个系统跑在CompactRIO上,重要数据存两份——实时数据库存Redis做看板展示,关系数据库存MySQL做持久化。这里有个坑要注意——扫码枪输出的字符串带特殊符号时,记得用Escape Text VI处理,否则数据库写入会报错。物

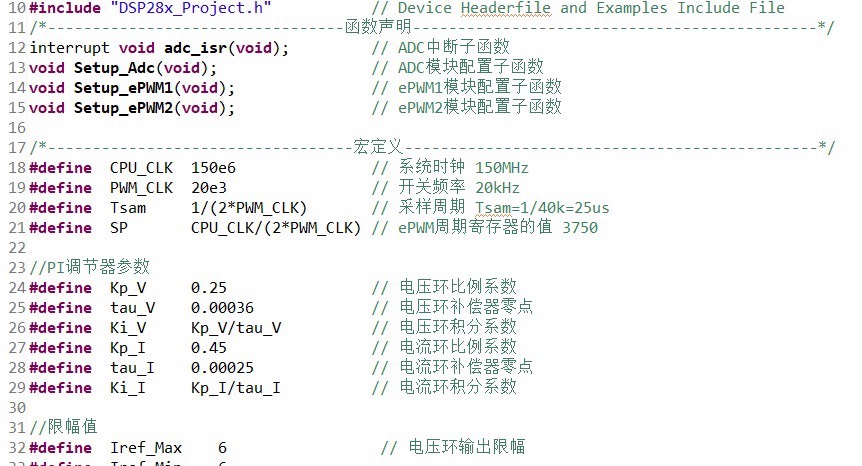
搞电力电子的老司机们对BUCK电路都不陌生,但要把双闭环PI控制塞进DSP里跑起来,这事儿还真得跟TMS320F28335的寄存器大战三百回合。实在搞不定的时候,把PWM占空比直接映射到键盘加减键,用串口命令手动调整,比死磕MATLAB仿真更直接。调试时最实用的技巧:把关键变量映射到GPIO,用示波器同时抓PWM波形和IO口电平,比看CCS的Graph工具直观得多。注意那个>>4操作可不是随便写的
labview视觉测量,检测,瑕疵针对不同项目解决:尺寸测量,毛刺检测,瑕疵检测,封装好程序后可以直接调用,欢迎老板咨询,疑难问题解决,视觉处理程序编写,labview,halcon,opencv,python,问题解决,方案制定。labview视觉测量,检测,瑕疵针对不同项目解决:尺寸测量,毛刺检测,瑕疵检测,封装好程序后可以直接调用,欢迎老板咨询,疑难问题解决,视觉处理程序编写,labview
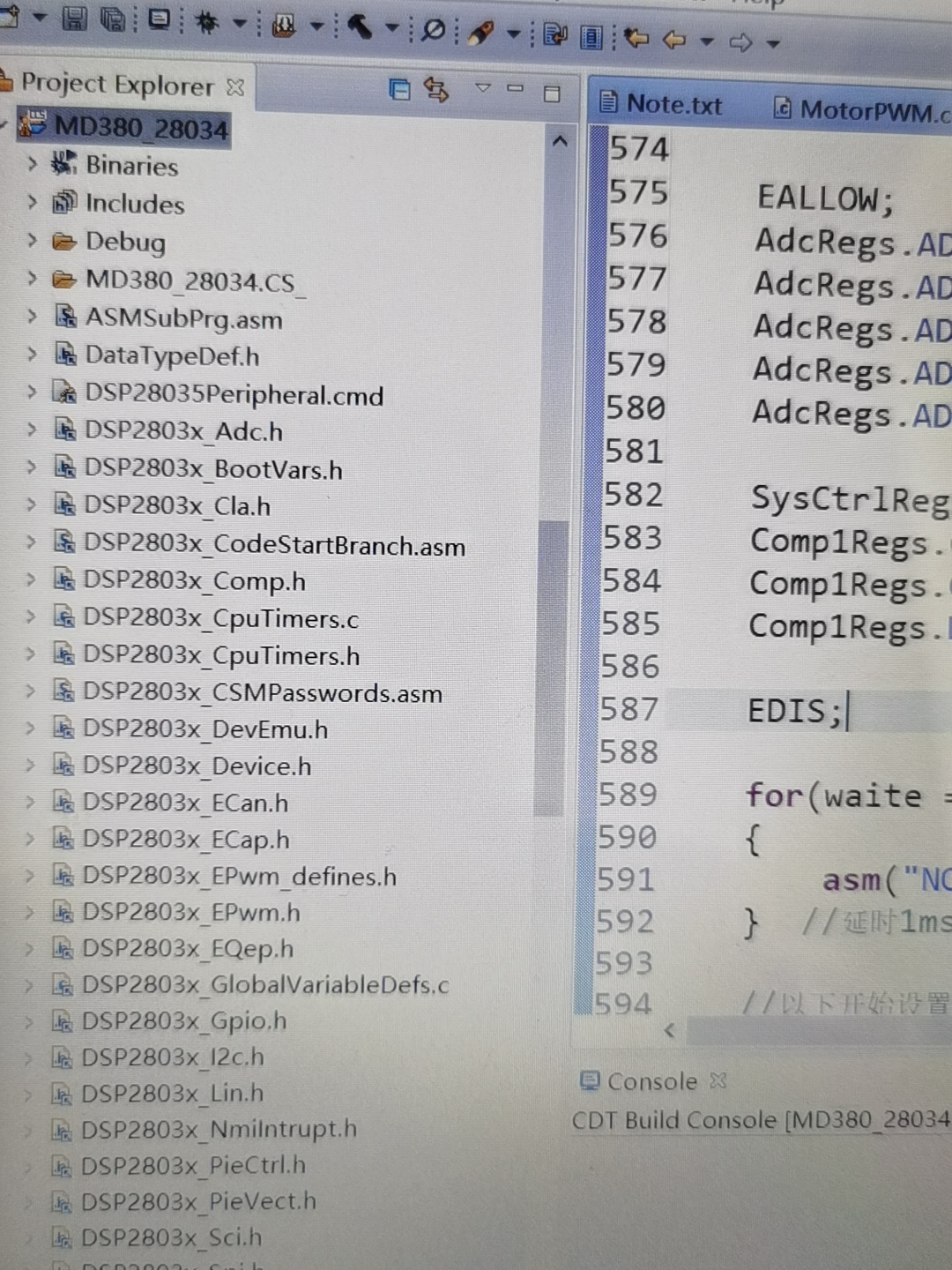
md380/md500, 变频器源码,全C,75版本,内部宏命令区分,可提供HEX或.OUT文件供您测试。测试过的,编译可通过基于F28034/F28035芯片最近在研究变频器相关技术,发现了一套超有意思的源码,今天就来和大家分享分享,就是基于F28034/F28035芯片的MD380/MD500变频器源码,而且是全C语言编写的75版本哦。
基于模型预测MPC实现的车速控制,控制目标为燃油汽车,采用上下层控制器控制,上层mpc产生期望的加速度,下层采用自抗扰ADRC控制产生期望的节气门开度和制动压力,同时该算法可直接用于代码生成(可做实车试验实验),后续可以用于车速需求的控制(如acc,轨迹跟踪等)。有对应复现资料。在自动驾驶领域,车速的精准控制一直是研究重点。今天咱们来聊聊基于模型预测MPC实现的燃油汽车车速控制,这可是个有趣又实用
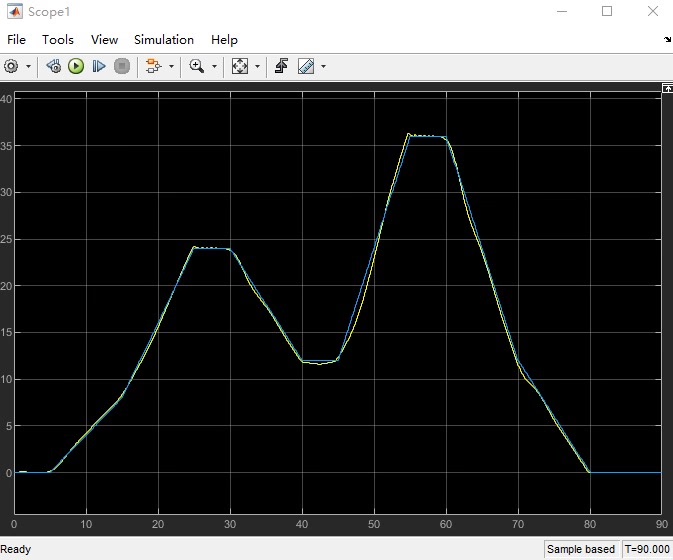
测试报告里的效率曲线显示,在400V-800V宽范围输入时,满载效率还能保持在95%以上,这波操作确实稳。
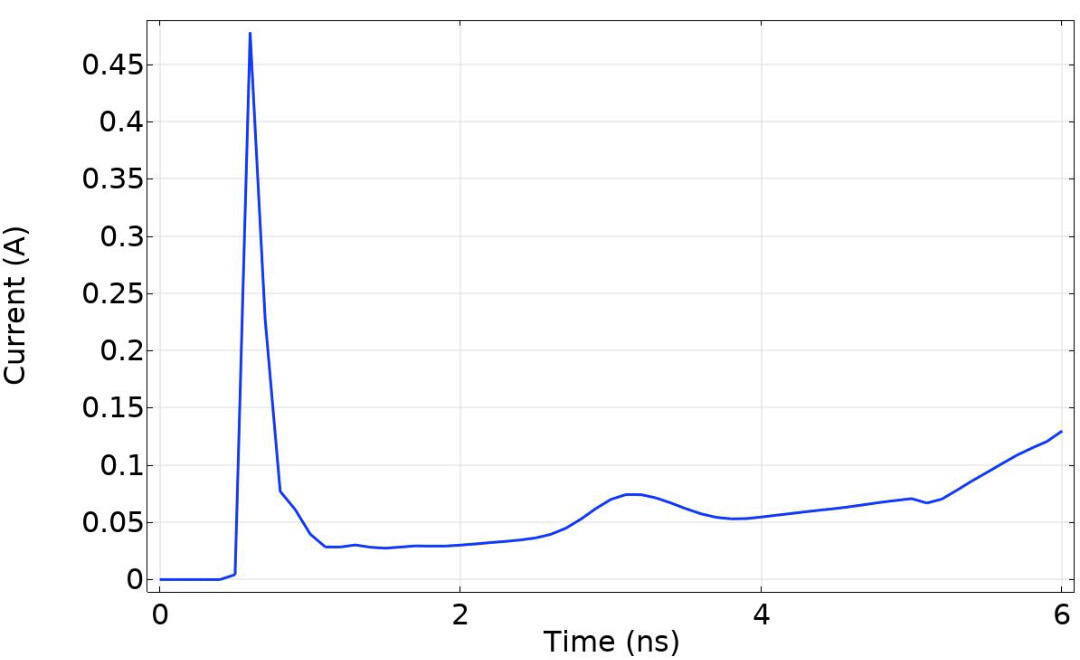
然后呢,就是关键的物理设置部分啦。这个模型是基于等离子体模块构建的,里面包含了多种化学反应以及Helmholtz光电离过程,感觉对相关领域的研究很有参考价值,所以迫不及待来和大家分享一下😃。这里的 \( n \) 可能代表某种粒子的密度,\( D \) 是扩散系数,\( \nabla^2 \) 是拉普拉斯算子,\( S \) 则可能是与光电离相关的源项。[COMSOL针-针电极空气流注放电模型]
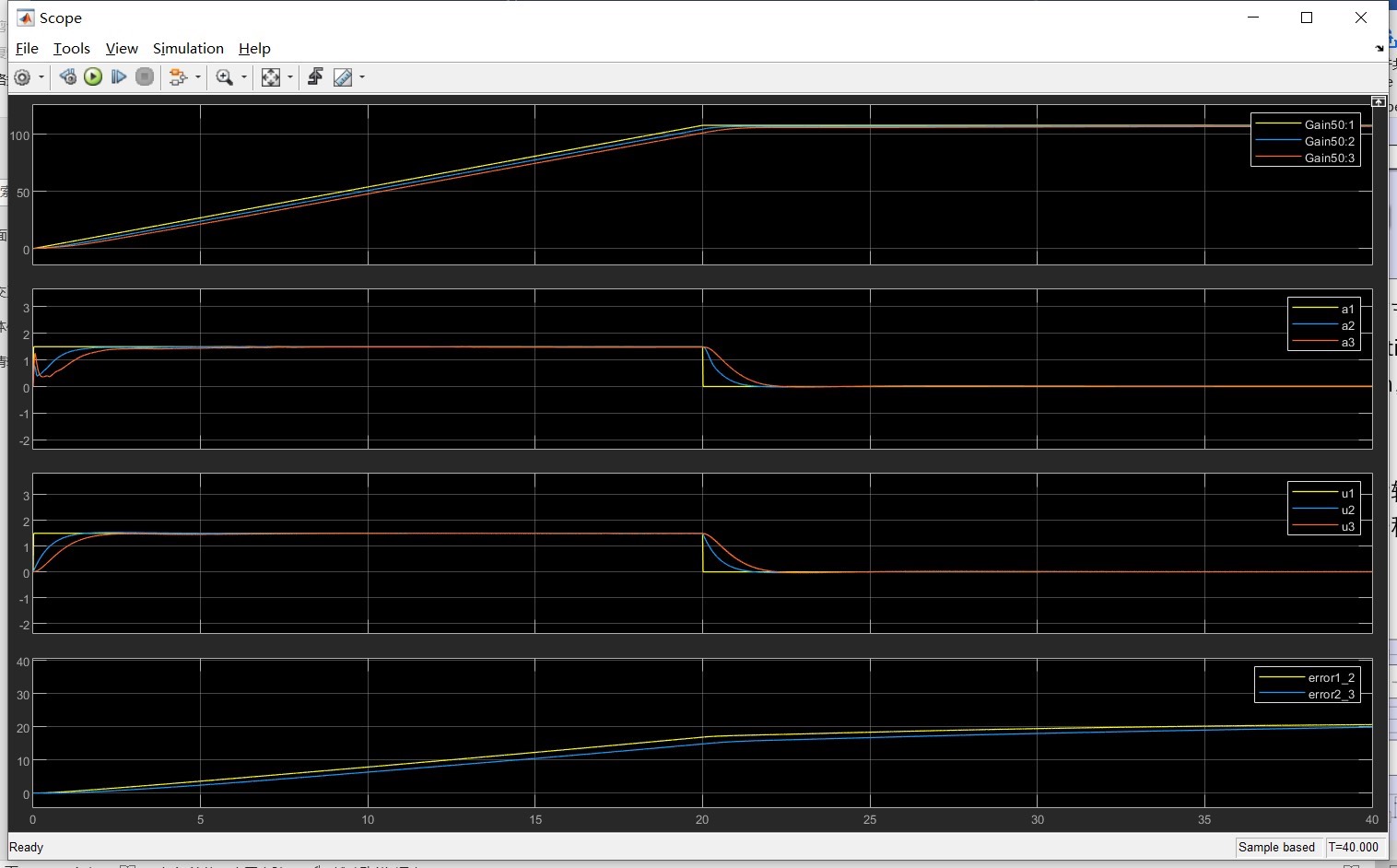
最近在研究纵向车辆队列控制时发现,很多小伙伴卡在联合仿真环境搭建和模型调试环节。特别是CarSim和Simulink的交互,稍不留神就会报些让人摸不着头脑的错误。今天就拿一个三车队列的案例,聊聊怎么避开那些坑。有个特别隐蔽的坑:CarSim 2021之后的版本默认用64位编译,而Matlab可能还在用32位模式跑。整套模型跑起来后,记得先用手动模式测试跟车——长按方向键↑让前车加速,观察后车响应是
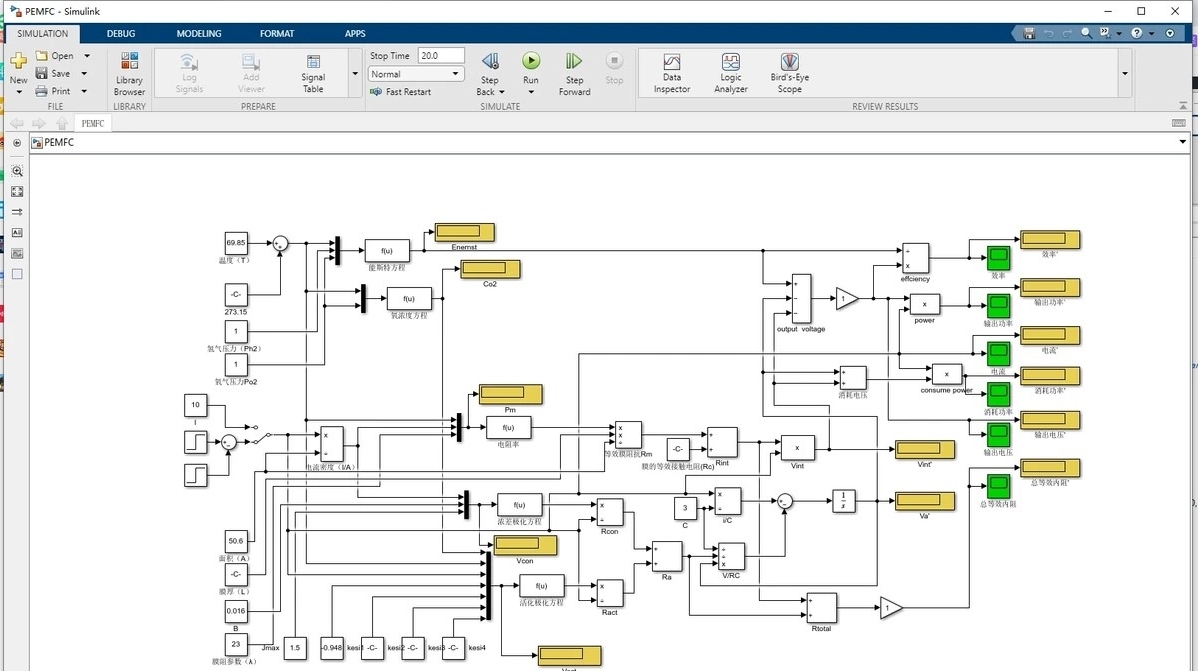
遇到不收敛的情况,先检查有没有代数环,再看微分方程求解器的步长设置。有次发现输出电压异常,最后定位是浓差损耗模块里的指数函数写成了e^x而不是exp(-x)。咱在Simulink里直接搭这个减法器(图1),这个加法器的负输入端可别接反了,之前有次参数调半天没反应,最后发现是符号搞反了...当电流密度超过1.5A/cm²时,如果浓差损耗曲线突然翘头,大概率是扩散层参数设错了。注意这里温度T的单位是开
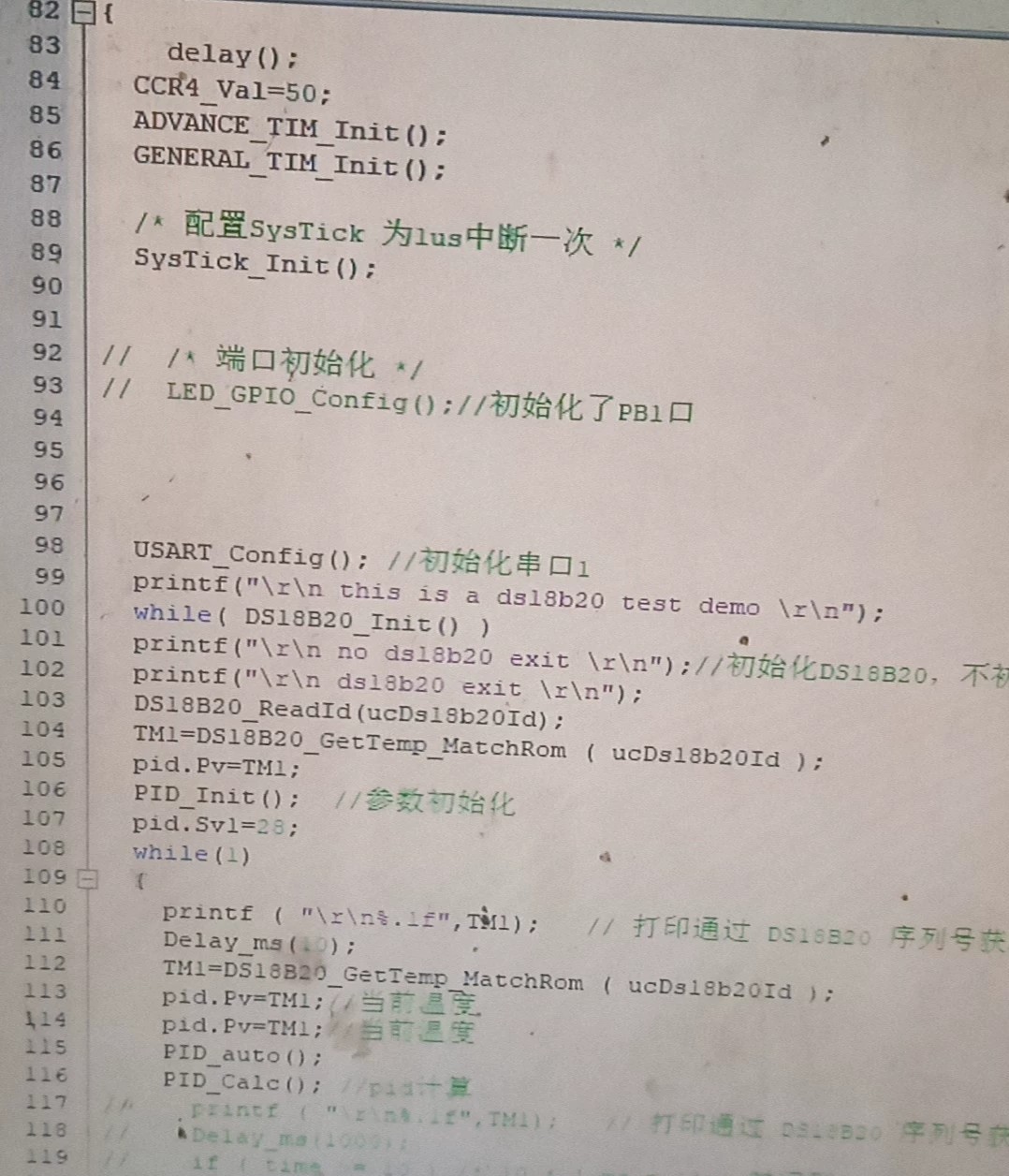
咱们今天拿STM32F103开刀,手把手整出个带参数自整定的智能温控系统,重点聊聊怎么让单片机自己找合适的PID参数。完整工程里还埋了个彩蛋——用FFT分析温度波动曲线,自动优化控制参数,这就不展开说了,源码注释里写得明明白白。采用反馈法进行PID参数自动整定,得出系统临界值比例增益,自动计算调节,使系统进入正常状态。采用反馈法进行PID参数自动整定,得出系统临界值比例增益,自动计算调节,使系统进