




- @BiRenhe
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
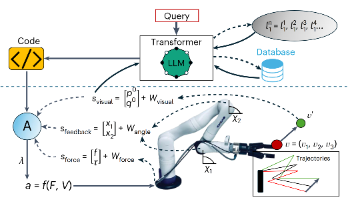
摘要(149字): 论文《Embodied large language models enable robots to complete complex tasks in unpredictable environments》提出ELLMER框架,通过GPT-4、RAG和传感器融合解决机器人长时序任务(如制作热饮)。系统分层设计:GPT-4解析自然语言指令并分解任务,RAG检索预定义技能库生成可
本文为机器人专业初学者提供了在Windows系统下使用WSL2搭建ROS开发环境的完整指南。文章首先解释了WSL2、Ubuntu和ROS三者的概念及层级关系:WSL2是Windows的Linux子系统平台,Ubuntu是运行其上的Linux操作系统,ROS则是基于Ubuntu的机器人开发框架。随后分步骤详细指导了环境搭建:包括开启CPU虚拟化、安装WSL2内核、部署Ubuntu 20.04系统,并

本文介绍了构建领域数据集和微调大模型LLaMA的完整流程。主要内容包括: 数据准备:申请API密钥,配置easy-dataset工具,从官网下载机器人相关PDF文档; 数据集构建:使用MinerU处理PDF文件,进行文本预处理、数据清洗,调用大模型API生成问答对并评分筛选; LLaMA Factory部署:安装环境依赖,配置模型缓存路径,启动WebUI界面; 模型训练:上传数据集,调整参数进行微

本文介绍了构建领域数据集和微调大模型LLaMA的完整流程。主要内容包括: 数据准备:申请API密钥,配置easy-dataset工具,从官网下载机器人相关PDF文档; 数据集构建:使用MinerU处理PDF文件,进行文本预处理、数据清洗,调用大模型API生成问答对并评分筛选; LLaMA Factory部署:安装环境依赖,配置模型缓存路径,启动WebUI界面; 模型训练:上传数据集,调整参数进行微
本文介绍了Linux系统的基础命令使用,主要分为四个部分: 基本语法:讲解Linux命令的结构,包括命令、选项和参数的写法,以及如何查看命令帮助(--help和man命令)。 目录和路径命令:介绍常用目录操作命令,如pwd查看当前路径、cd切换目录、ls查看目录内容、mkdir创建文件夹等,并解释了常见路径符号的含义。 文件操作命令:包括touch创建文件、cp复制、mv移动/重命名、rm删除文件
本文介绍了构建领域数据集和微调大模型LLaMA的完整流程。主要内容包括: 数据准备:申请API密钥,配置easy-dataset工具,从官网下载机器人相关PDF文档; 数据集构建:使用MinerU处理PDF文件,进行文本预处理、数据清洗,调用大模型API生成问答对并评分筛选; LLaMA Factory部署:安装环境依赖,配置模型缓存路径,启动WebUI界面; 模型训练:上传数据集,调整参数进行微
本文介绍了如何利用云服务器进行远程开发,主要步骤包括:1)在AutoDL平台租赁服务器;2)配置服务器环境并创建项目文件夹;3)使用FileZilla传输本地文件到服务器;4)在PyCharm中配置远程解释器;5)通过SSH隧道访问服务器运行的WebUI界面。文章还提供了常见问题解决方案,如端口映射、文件同步优化等,帮助开发者突破本地硬件限制,高效利用云端算力进行深度学习等项目开发。
