- @2504_94289075
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
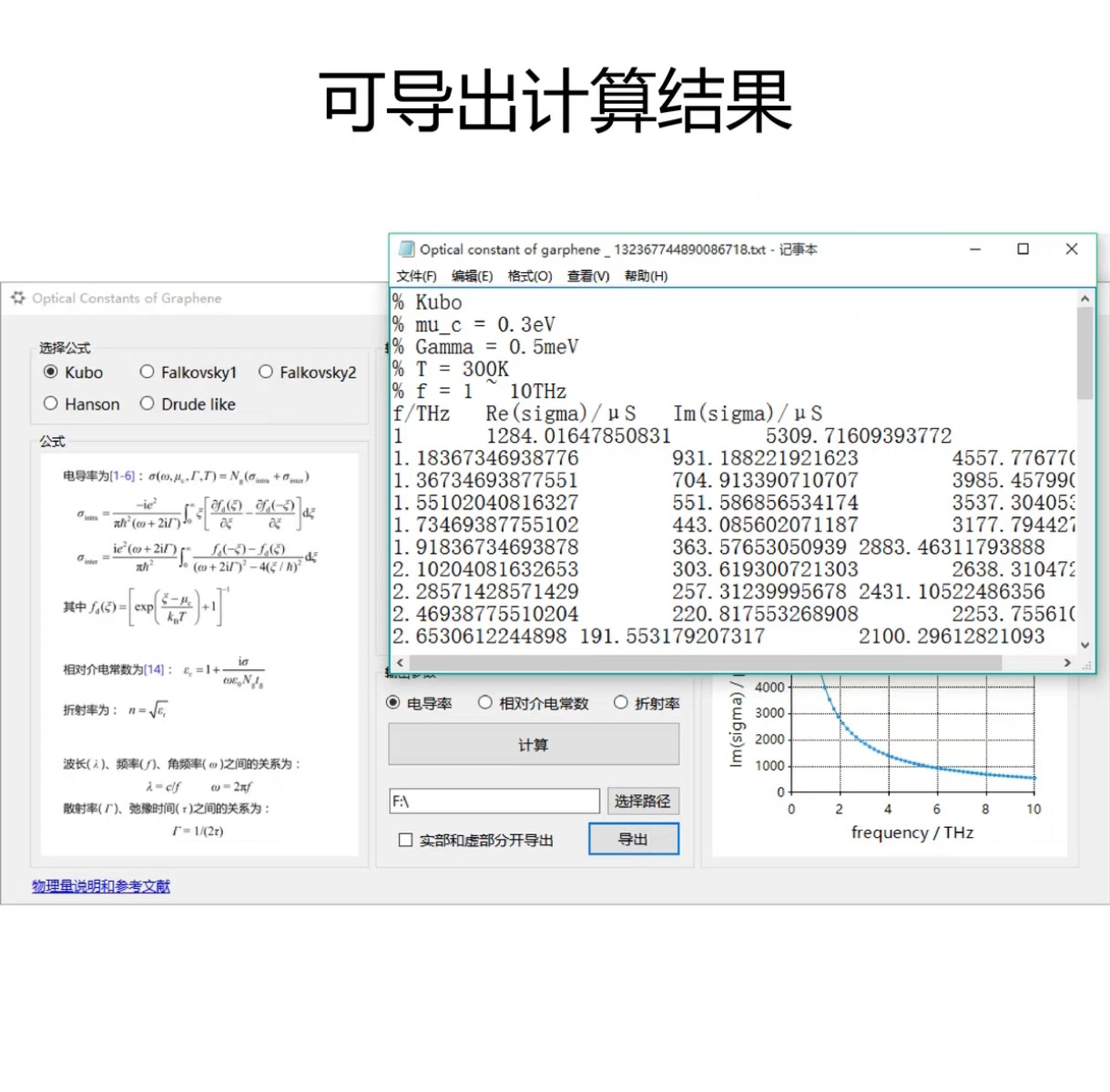
FDTD(时域有限差分法)是一种用于求解麦克斯韦方程组的数值计算方法,基于这种方法开发的FDTD软件能对各种光学结构进行精确模拟。对于石墨烯的光学常数计算,它可以模拟光与石墨烯相互作用的过程,从而得到相关的光学常数。Comsol是一款多物理场仿真软件,它可以将光学、电磁学等多个物理场进行耦合模拟。在计算石墨烯光学常数时,Comsol可以考虑更多的物理因素,提供更全面的模拟结果。
重点在于理解它的时钟机制:两条差分时钟线CLK_P/N带着像素时钟,真正的玄机在上升沿和下降沿的双沿采样。现在这套架构在A7上只用不到15%的LUT资源,最狠的一个项目用V7同时接四路CameraLink还能跑满85MHz。本人在xilinx(赛灵思)A7,K7,V7,zynq7,ultrascale以及ultrascale+ 系列的FPGA上已经验证通过,相关项目已经交付。这个滑动窗口检测器帮我

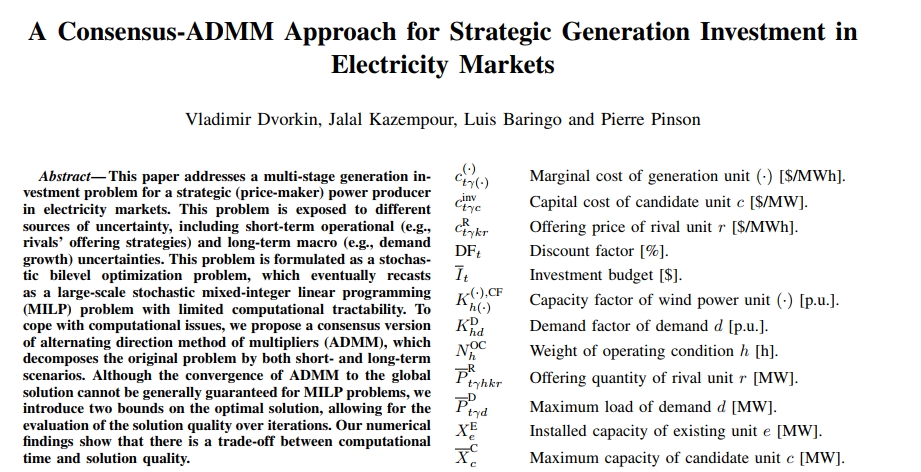
本程序主要介绍ADMM算法在GAMS中的编写方式,模型基于发电商竞标策略进行编写,基本包含了文章中的模型,但并非完全复现,可作为参考程序自学使用,也可在程序的基础上进行修改使用。本程序主要介绍ADMM算法在GAMS中的编写方式,模型基于发电商竞标策略进行编写,基本包含了文章中的模型,但并非完全复现,可作为参考程序自学使用,也可在程序的基础上进行修改使用。程序包括两个,分别为解决战略投资问题的广义M
本框架以“设备无关、算法插件化、业务可编排”为设计目标,将工业现场 80% 的共性需求抽象为四大类、二十余个子模块,覆盖“取像→标定→定位→测量→识别→通讯”完整链路。开发者无需关心底层 OpenCV 版本差异与相机 SDK 细节,通过统一接口即可在 30 分钟内搭建一条视觉检测工程。该框架把“工业视觉”拆分为可插拔的原子能力,让开发者聚焦工艺逻辑而非算法细节;全部源码,包含图像显示控件,绘制ro
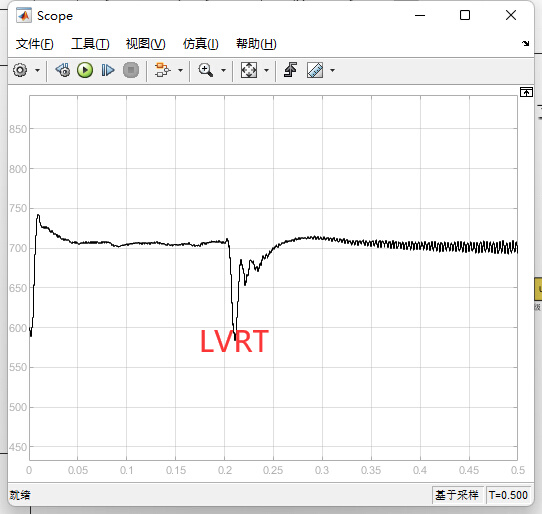
模型验证阶段有个反直觉的发现——在离网转并网瞬间,主动引入5%的电压偏差反而能降低冲击电流。实际调试时要注意步长设置,0.5%左右的V_step既不会震荡太大又能快速追踪,比固定步长方案响应速度快了约30%。光伏微电网玩得溜,蓄电池和超级电容的混合调度才是真功夫。今天咱们拆解一个能实战的Matlab模型,重点看看怎么让光伏板在阴晴不定的光照里稳定输出,再聊聊储能系统如何丝滑切换工作模式。当检测到电
400W伺服配760块的线缆套装,750W贵90块但能扛住更高频次的启停。控制器选2600的全功能版不是钱多烧的,它的运动控制核能同时处理8轴联动,后期要加个自动上料机械臂也不用换主控。除了伺服刚性调得好,关键还在控制器的20μs级任务周期,比传统PLC快了一个数量级。别看这代码短,里头藏了两个狠招:第一行用绝对位置触发保证裁切时机精准,第三行的增量算法让系统自动适应连续生产。车间里飞剪的金属摩擦
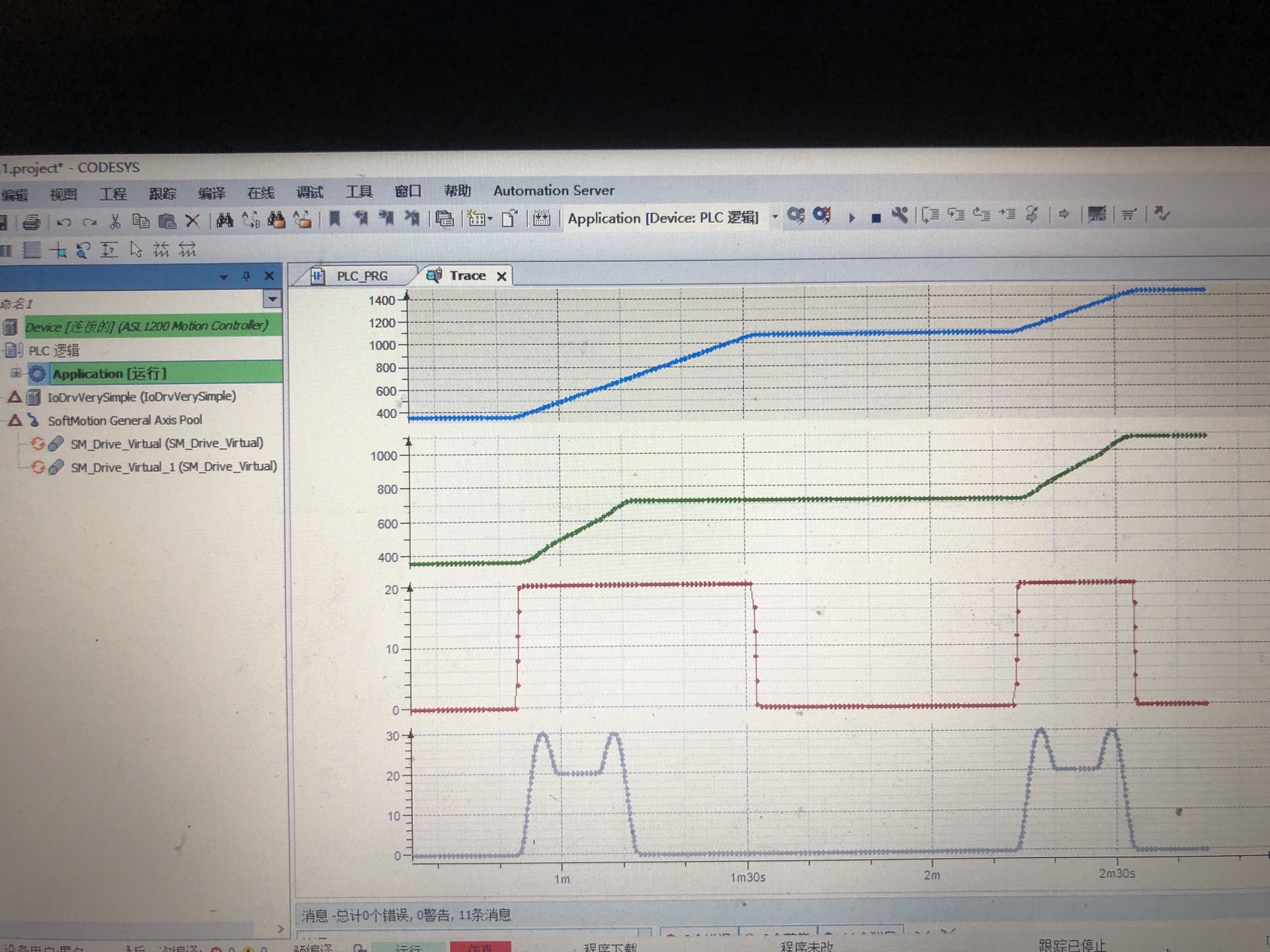
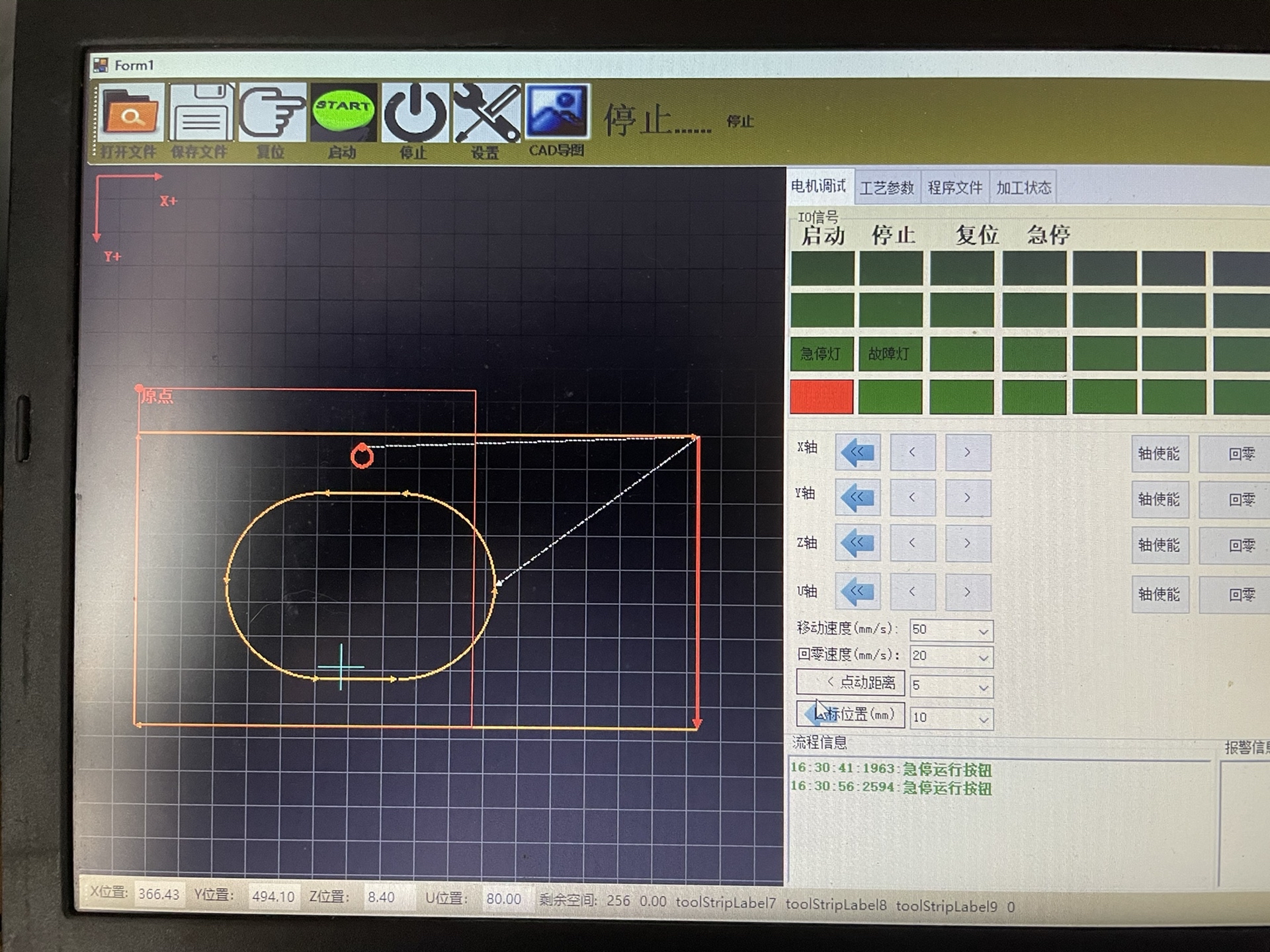
最近在自动化设备开发群里发现不少同行在找靠谱的运动控制方案,尤其是那种能直接上手改源码的。这个框架用C#写的,特别适合既要搞运动控制又要处理图形的场景,咱们从实战角度看看怎么玩转这些功能。有个骚操作:在IO状态变更事件里挂上自定义回调,用来做急停连锁比用PLC快3个毫秒,别小看这点时间,高速分拣机上能救命。记得把设备坐标系的Y轴反转,不然图纸显示是倒的,别问我怎么知道的...支持回零运动,io控制
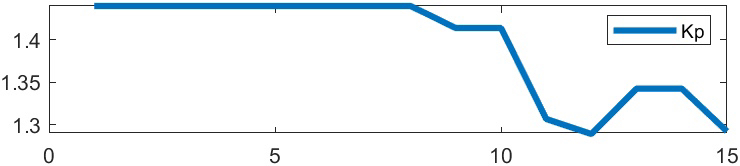
然后初始化粒子的位置和速度,在每次迭代中,计算每个粒子的适应度(这里用误差平方和来衡量),更新个体最优和全局最优。咱先来说说啥是PID控制。但实际情况哪有那么简单,不同的工况下,固定的参数可不一定能带来最佳效果。在面对不同工况时,它能更快地调整控制参数,让系统的响应更迅速、更稳定,误差也更小。这次的探索真的让我对控制系统有了更深的理解,粒子群算法和PID控制的结合简直太妙啦!粒子群在线自适应优化p
显示机组的运行数据,如机组的瞬时发电功率、累计发电量、发电小时数、风轮及电机的转速和风速、风向等,用风玫瑰图、曲线或图表的形式直观地显示出来,显示风电机组的运行状态。显示机组的运行数据,如机组的瞬时发电功率、累计发电量、发电小时数、风轮及电机的转速和风速、风向等,用风玫瑰图、曲线或图表的形式直观地显示出来,显示风电机组的运行状态。风机序号、故障类型、负责人、处理状态、处理时间、描述等,其中故障类型

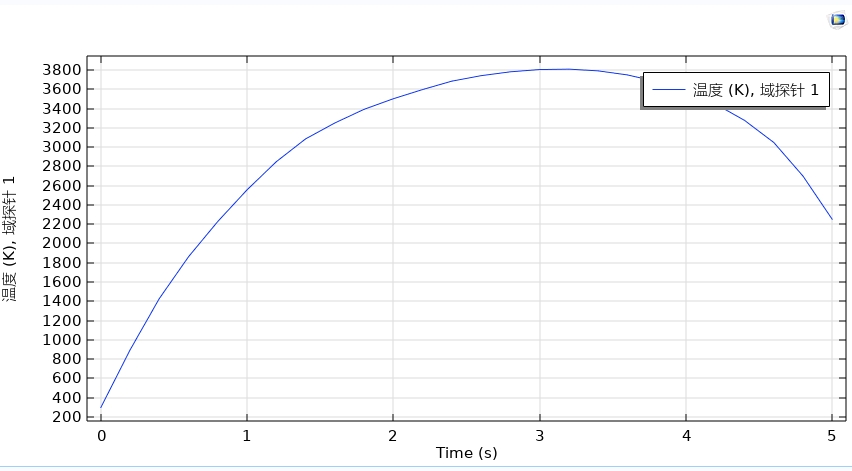
后面的指数项构建了温度场的"火山口",x和y跟着激光头坐标实时漂移,活像熔池在跳机械舞。通过瞬态热分布可以获得凝固特征,包括温度梯度(G)、凝固生长速率(R)和凝固凝固速率(GR),从而预测凝固组织的形貌和规模。通过瞬态热分布可以获得凝固特征,包括温度梯度(G)、凝固生长速率(R)和凝固凝固速率(GR),从而预测凝固组织的形貌和规模。激光直接沉积过程中,快速熔化凝固和多组分粉末的加入导致了熔池中复