- @2504_94288833
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
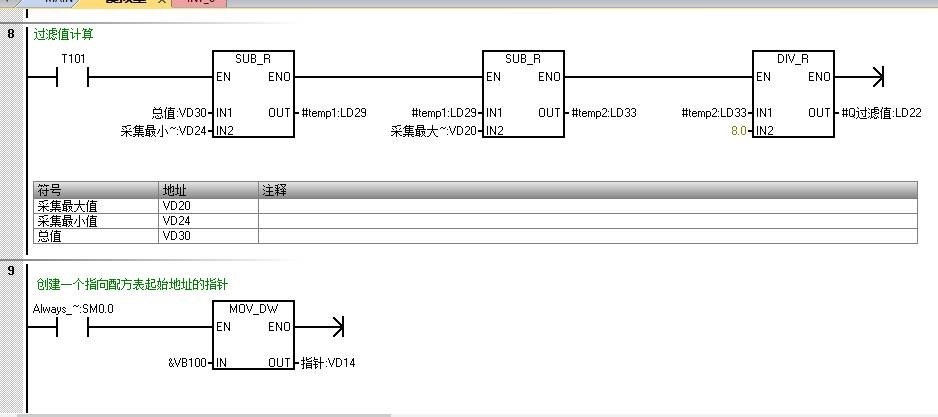
西门子200smart模拟量滤波防抖程序,能实现电流电压和热电阻模拟量信号的采集,有滤波,有高位和低位报警,采用for循环指令和间接寻址,让程序简单好用,并且针对程序,录制了视频讲解,详细的介绍了程序的思路,值得拥有在自动化控制领域,西门子200smart系列PLC应用广泛。今天就给大家分享一个超实用的模拟量滤波防抖程序,它能轻松实现电流、电压以及热电阻模拟量信号的采集,同时具备滤波、高位和低位报
器件:欧姆龙CP1H,CP1W CIF11串口网关板,1台施耐德ATV12变频器,昆仑通态TPC7062KD触摸屏。欧姆龙CP1H的CIF11通讯板,实现对施耐德ATV12变频器 设定频率,读取实际频率,变频器状态功能。欧姆龙CP1H的CIF11通讯板,实现对施耐德ATV12变频器 设定频率,读取实际频率,变频器状态功能。同时解决了施耐德变频器断电重启后,自准备过程,无需人为再准备。说明:是程序,

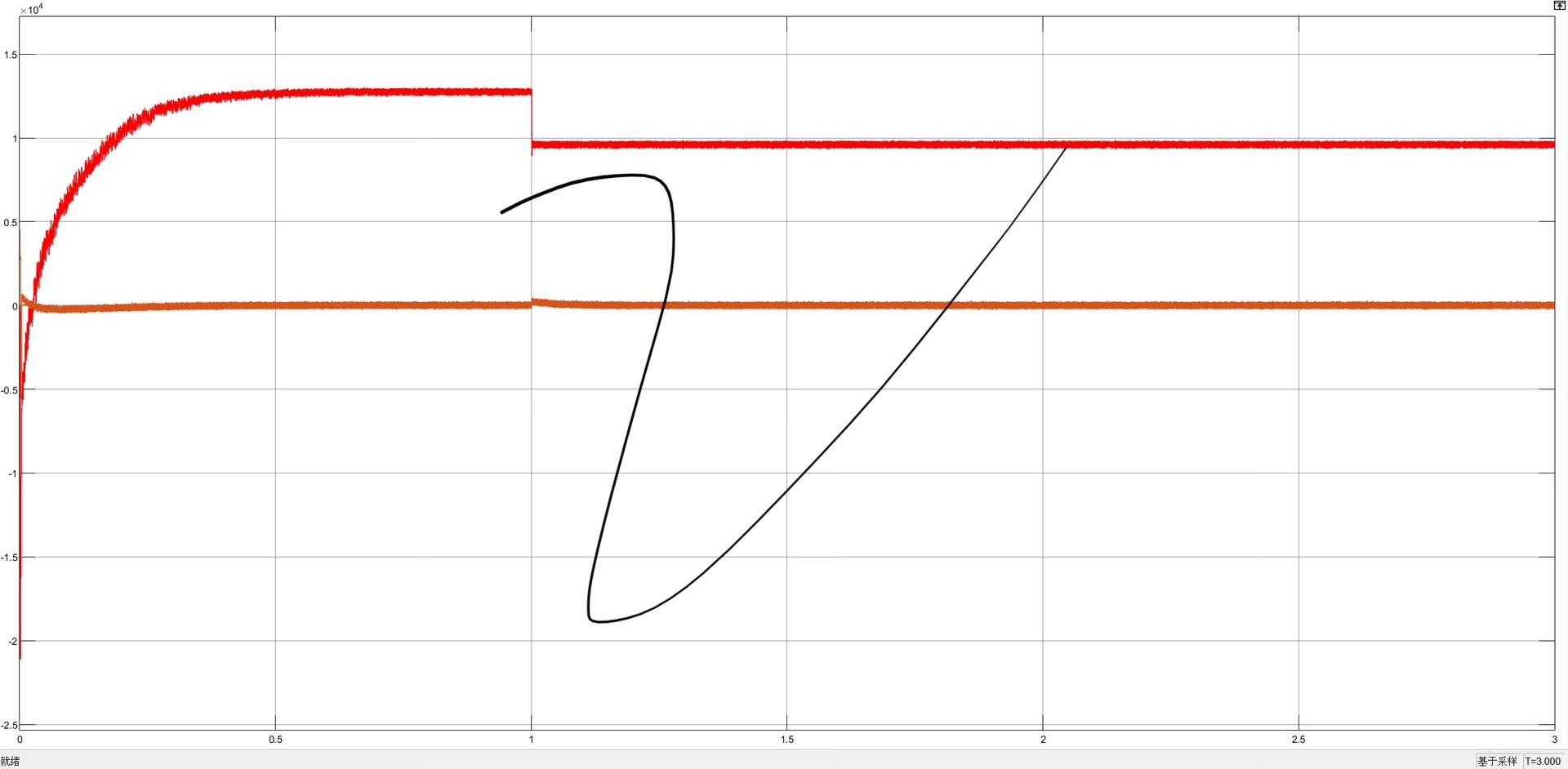
绝对原创MATLAB/Simulink 2021b 直流微电网风、光、储、负载、逆变器风力发电和光伏发电采用MPPT控制储能单元采用双环控制直流测电压为750V逆变器采用PQ控制风机功率慢慢升高,电网从一开始提供功率到吸收多余功率。在电力系统研究领域,直流微电网因其高效、灵活等特性,正逐渐成为热门话题。今天咱就来唠唠基于MATLAB/Simulink 2021b搭建的包含风、光、储、负载及逆变器的
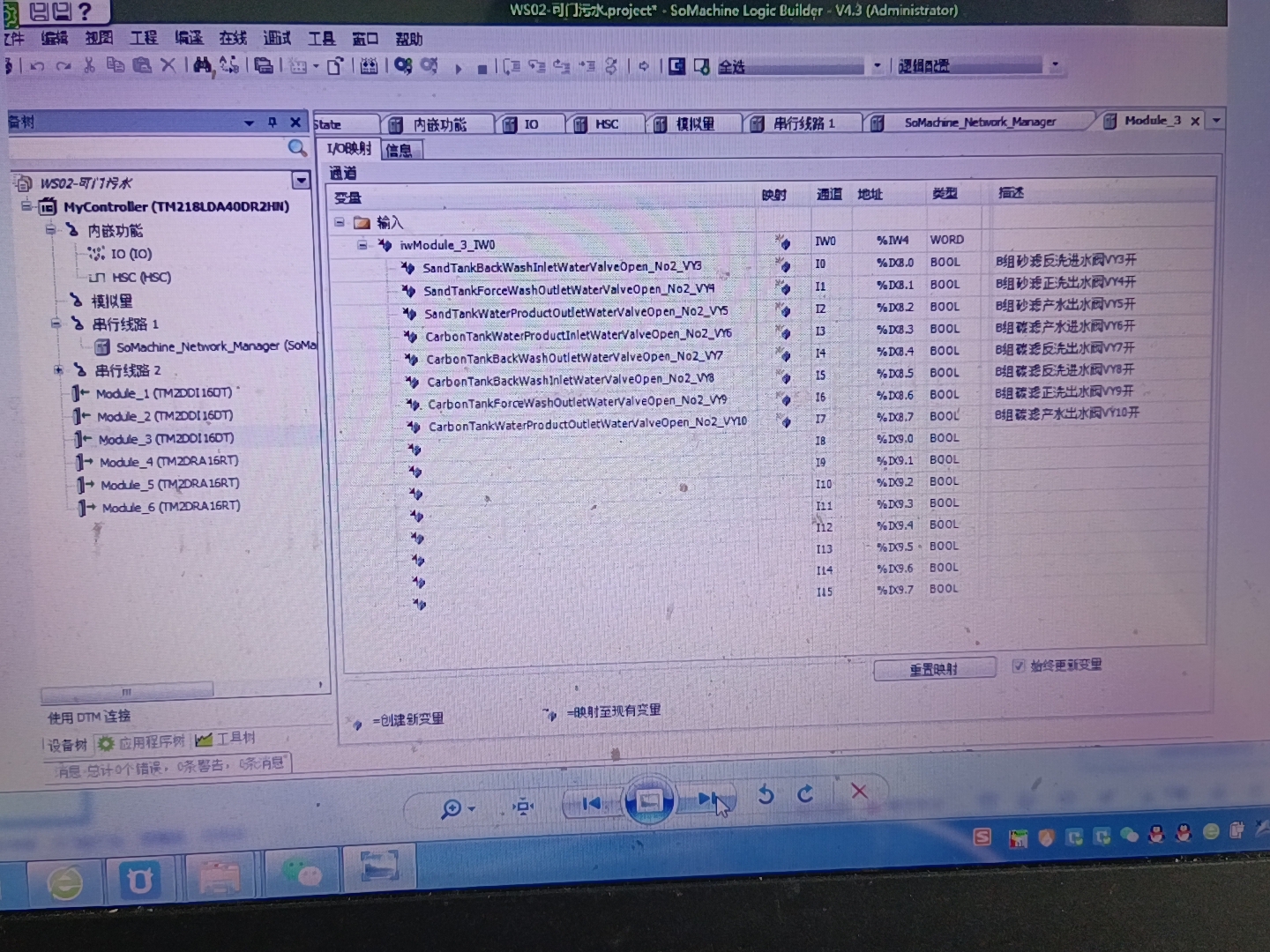
污水处理施耐德TM218PLC程序,SoMachine V4.3软件设计,带软件下载链接,带io分配和注释最近做了一个污水处理相关的施耐德TM218 PLC项目,用SoMachine V4.3软件进行设计,在这里和大家分享一下整个过程,还会给出软件下载链接以及详细的IO分配和注释。
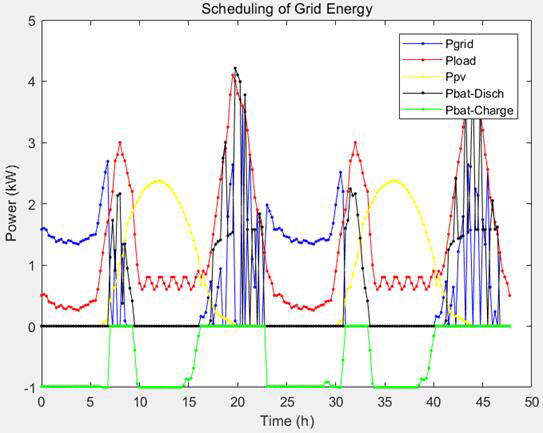
本系统实现了一个面向微电网场景的储能电池容量优化配置模型,采用混合整数线性规划(MILP)方法,在满足系统运行约束的前提下,以最小化运行成本为目标,联合优化储能容量、充放电策略以及与主网之间的购售电行为。该模型充分考虑了实际工程中的关键非线性因素(如逆变器效率分段特性、电池充放电效率、容量边界等),并通过线性化建模技巧将其纳入MILP框架,兼顾了求解精度与计算效率。
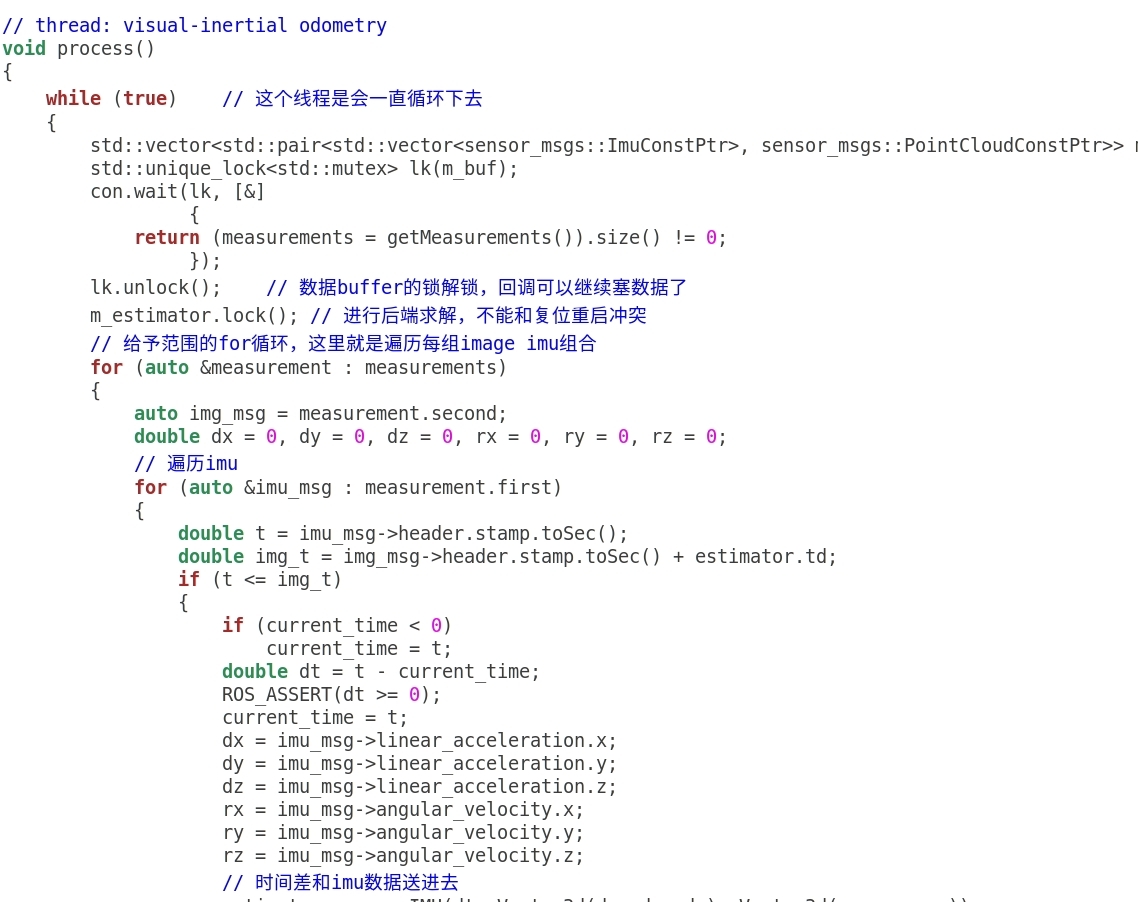
实际跑起来你会发现,即便在纹理稀疏的墙面,它也能维持稳定的特征密度,比OpenCV原生的特征检测更抗环境变化。先看特征跟踪这个最吃性能的环节。这套组合拳在低纹理环境下依然坚挺,实测在商场玻璃幕墙场景,当特征点数量掉到30以下时,还能稳定输出初始位姿,比传统八点法靠谱多了。安装环境配置文档及编译运行文档,附带可测试的开源ROS数据包, 代码主干部分带有中文注释,并提供大框架梳理的思维导图。安装环境配
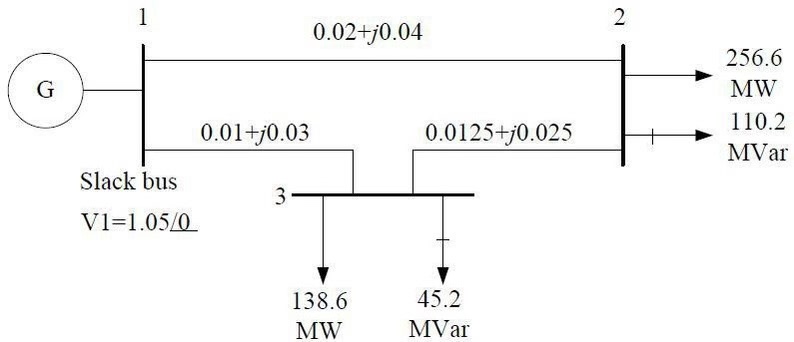
该 MATLAB 小程序以“最小闭环”理念,把经典 Gauss-Seidel 算法浓缩在数十行代码内,却保留了完整的电力系统潮流计算要素:网络方程、节点类型、迭代收敛、支路潮流、网损统计。主要内容:潮流计算是判断电力系统是否稳定的重要方法,通过最初赋予的初始条件来进行计算系统的当前状态,分析结果对于电力系统的维护非常的重要。主要内容:潮流计算是判断电力系统是否稳定的重要方法,通过最初赋予的初始条件
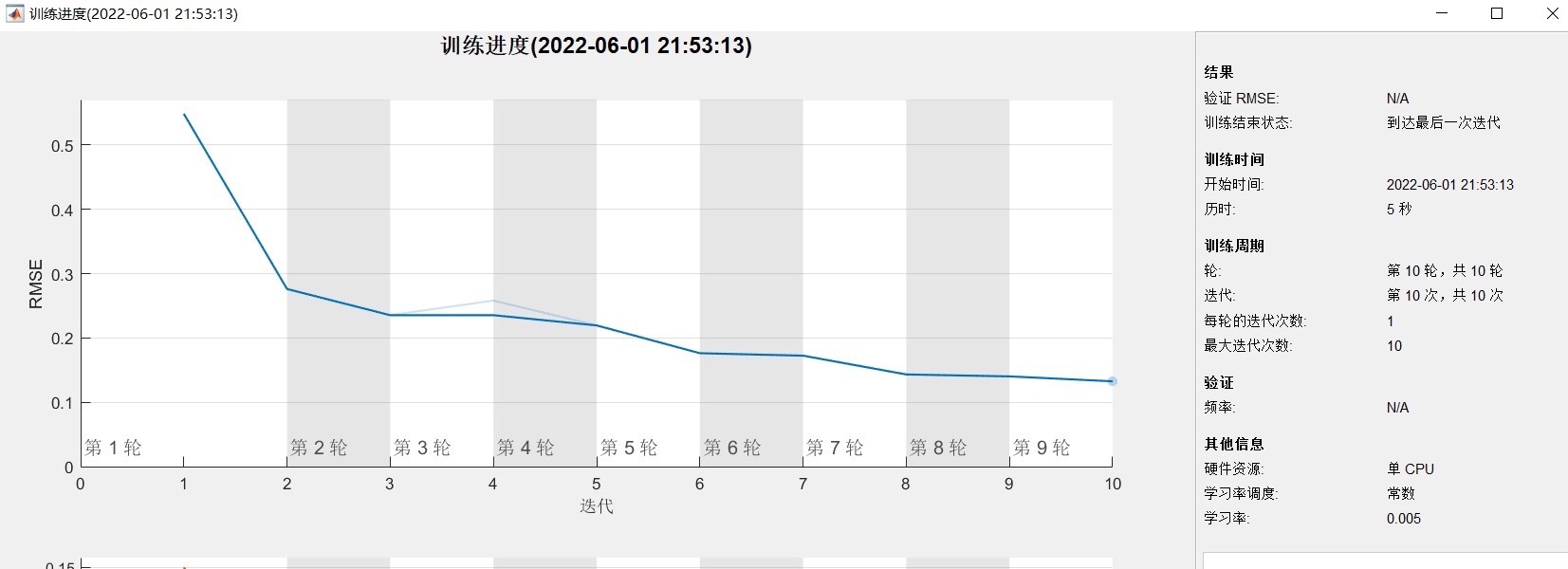
效果嘛,拿某省电网数据实测,96点预测的平均绝对误差2.3%,比单一LSTM模型提升明显。关键是这种组合策略对数据突变点捕捉能力更强,不会出现传统模型那种滞后预测的情况。代码全公开有点难,但核心思路都在这了。预测这玩意儿,永远没有银弹,多折腾才是王道。建议用动态时间规整(DTW)做校准,代码不展开说,自己查文档。将数据进行EMD分解,再采用经蚁群算法优化的双向长短时记忆神经网络进行预测,最终将结果
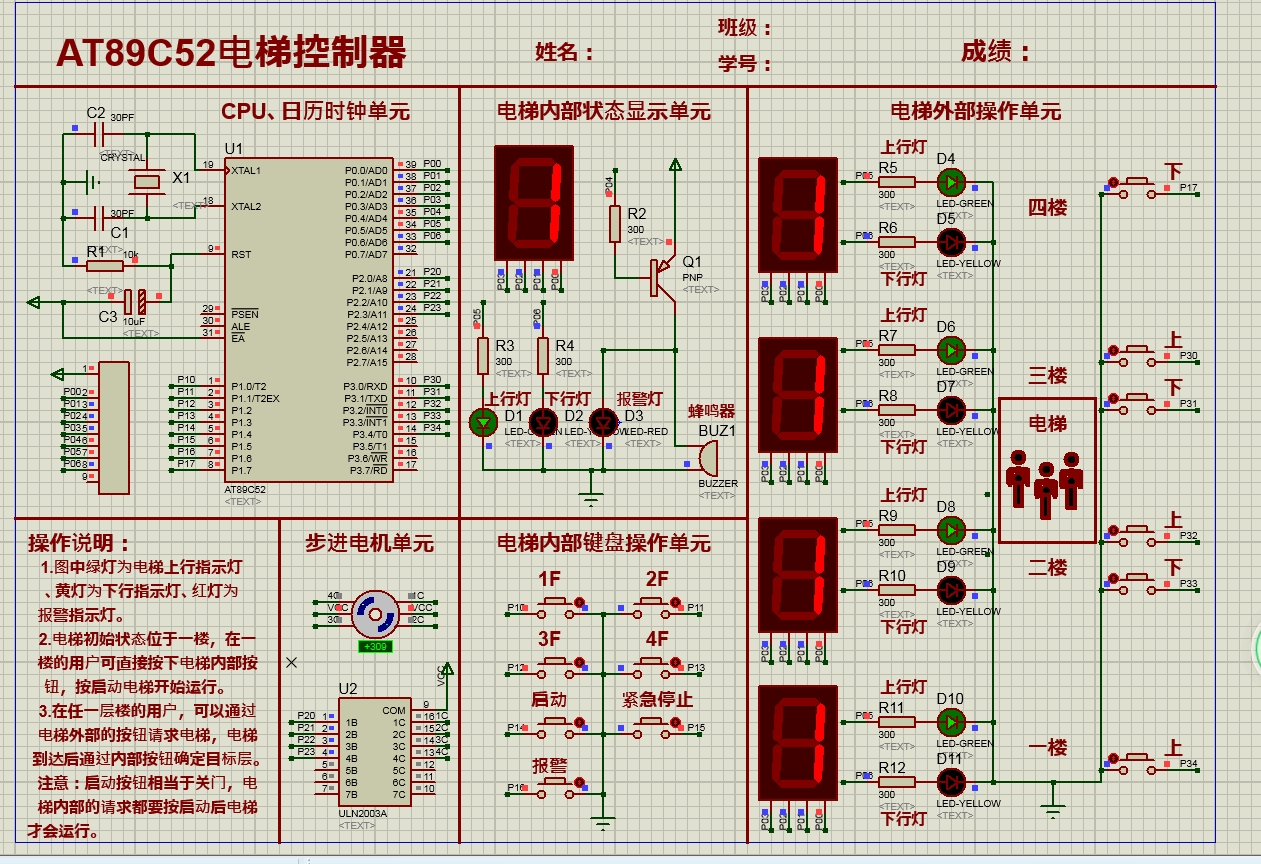
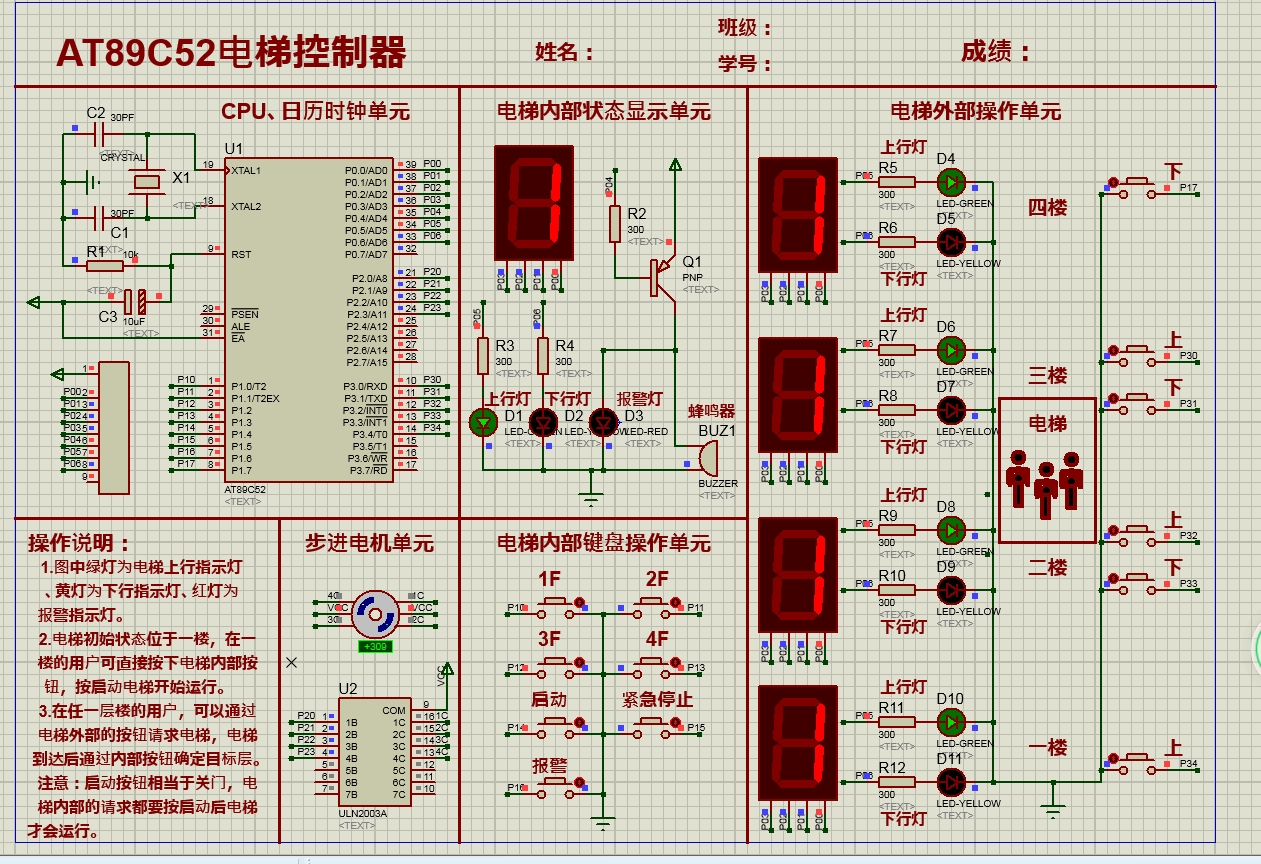
基于51单片机的电梯控制系统操作说明:1.图中绿灯为电梯上行指示灯、黄灯为下行指示灯、红灯为报警指示灯。2.电梯初始状态位于一楼,在一楼的用户可直接按下电梯内部按钮,按后动电梯开始运行。3.在任一层楼的用户,可以通过电梯外部的按钮请求电梯,电梯到达后通过内部按钮确定目标层。注意:启动按钮相当于关门,电梯内部的请求都要按启动后电梯才会运行。在嵌入式系统开发领域,基于51单片机构建有趣又实用的项目一直
基于51单片机的电梯控制系统操作说明:1.图中绿灯为电梯上行指示灯、黄灯为下行指示灯、红灯为报警指示灯。2.电梯初始状态位于一楼,在一楼的用户可直接按下电梯内部按钮,按后动电梯开始运行。3.在任一层楼的用户,可以通过电梯外部的按钮请求电梯,电梯到达后通过内部按钮确定目标层。注意:启动按钮相当于关门,电梯内部的请求都要按启动后电梯才会运行。在嵌入式系统开发领域,基于51单片机构建有趣又实用的项目一直