




- @2503_94130034
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
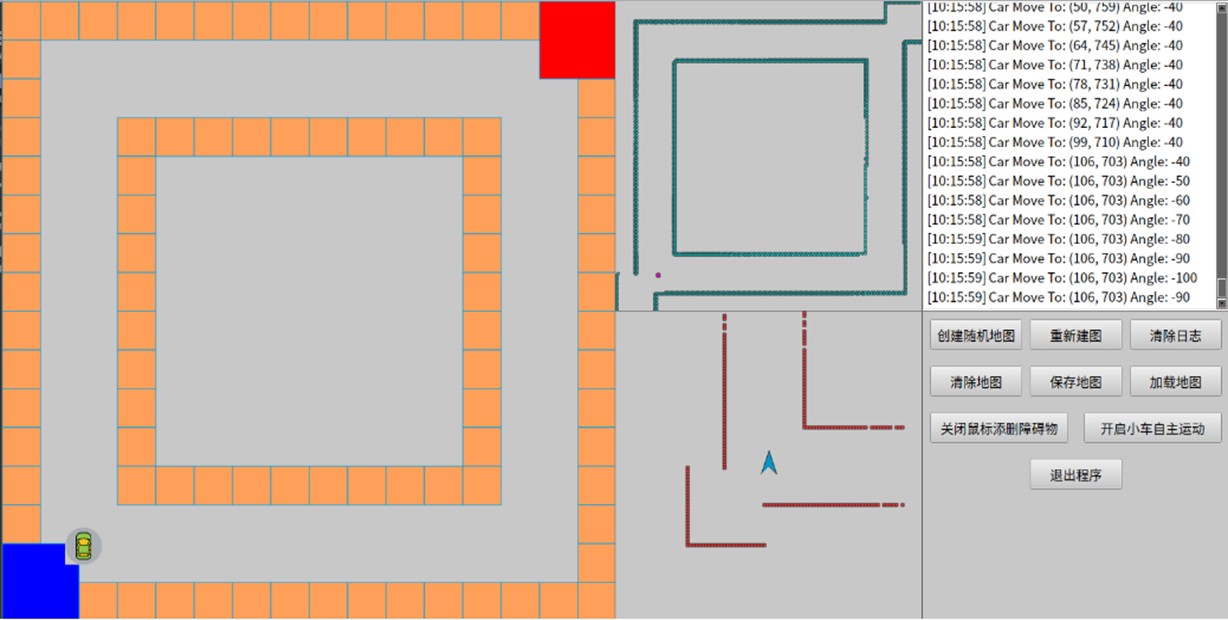
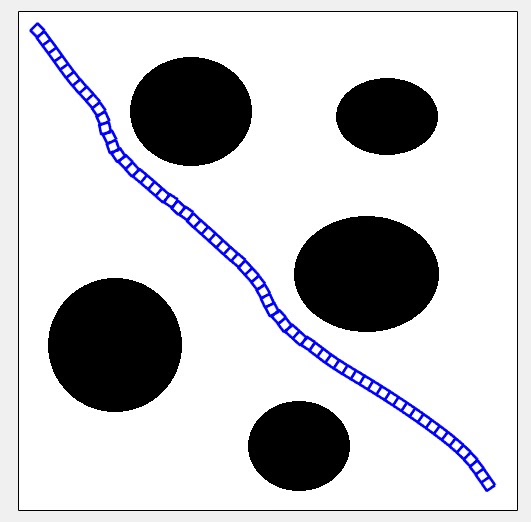
Qt/C++实现的程序演示了使用激光雷达构建地图的整个过程,创建随机地图,使用上下左右键来控制小车的运动,小车在运动的过程中右上角会实时创建以点组成的地图,以点的形式显示小车周围的地图,右下角显示小车在场景中的方向,鼠标可以在地图添加图块障碍物,每一步都会有日志进行记录。右上角的点云地图像墨水晕染般展开,右下角的指南针指针微微颤动——这个用Qt/C++实现的激光雷达模拟器,把SLAM的趣味性直接拉
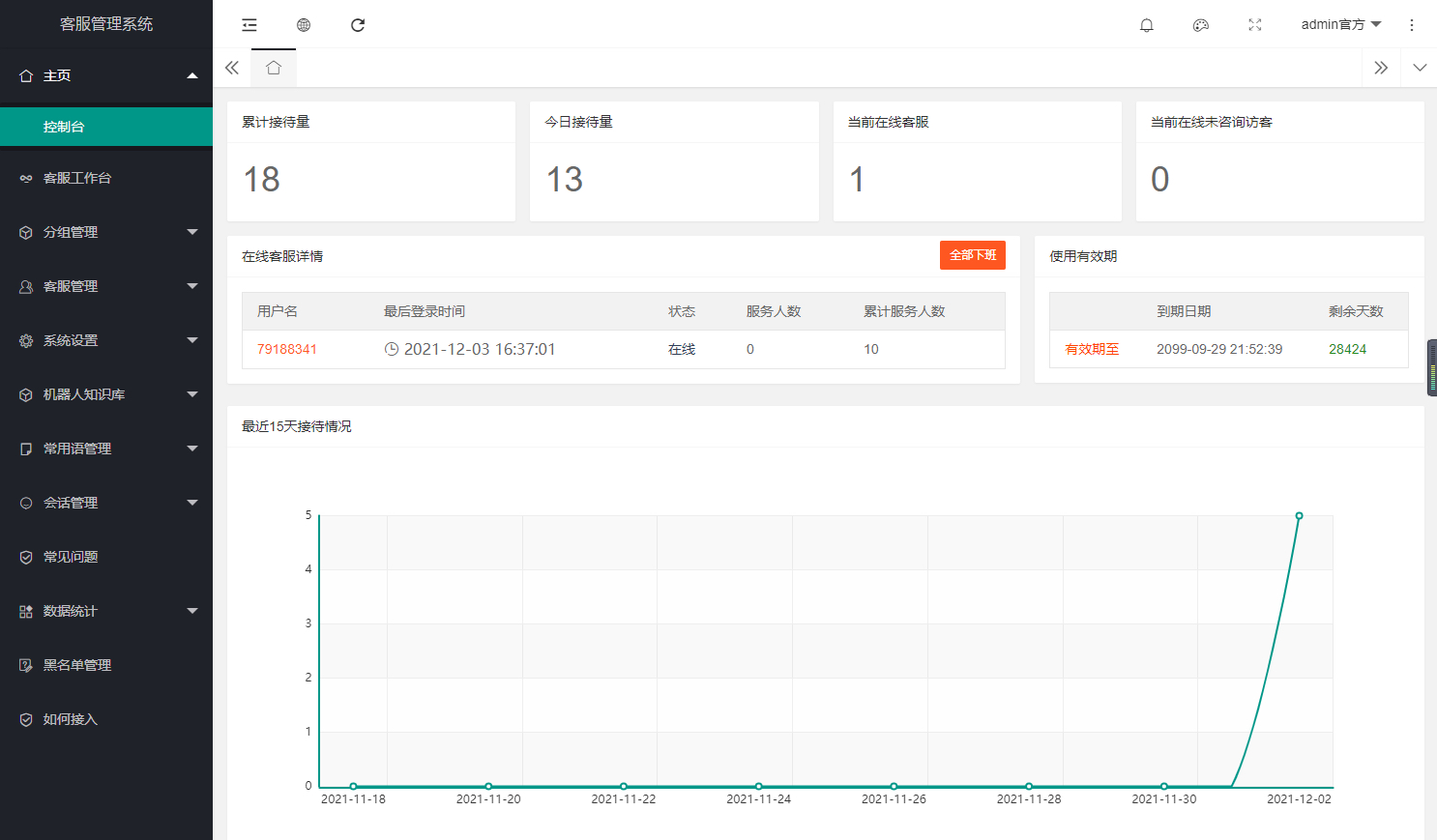
有个客户真信了无限坐席的邪,愣是开了200多个客服账号,系统居然还真扛住了——毕竟按需分配资源才是王道。今天咱们扒一套TP5.1内核的多商户客服系统源码,这玩意儿能同时让几百个商家在同一个平台各玩各的,最关键的是连机器人陪聊都给你整明白了。在线客服系统源码,多商户在线客服系统可开机器人自动聊天多商户在线客服源码,TP5.1核心多商户版在线客服系统,可对接[PC+WAP+公众号]等适用场景 支持机器
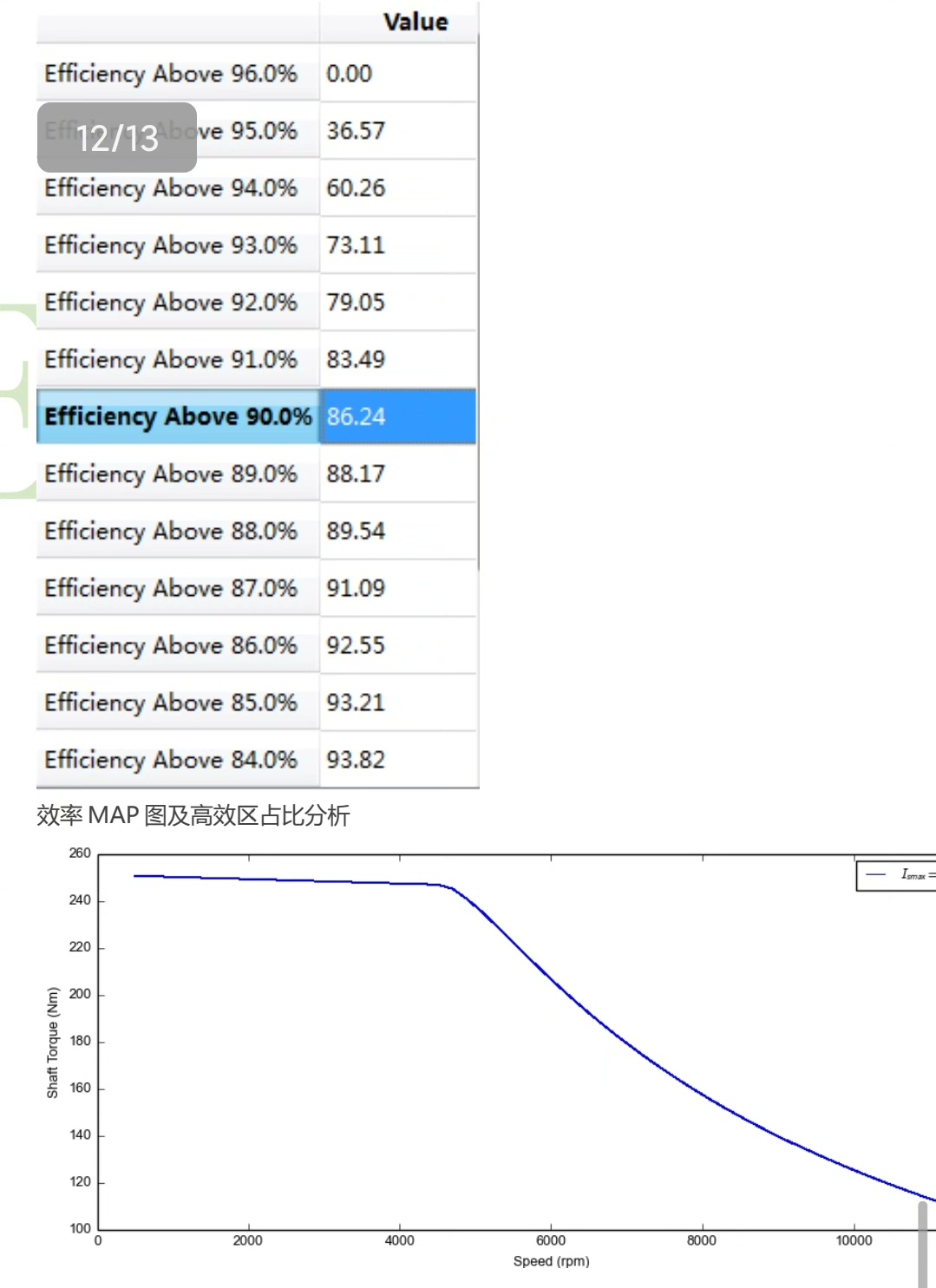
为了优化这个问题,我决定调整磁钢的布置方式,采用更加均匀的磁钢排列,以减少端部的磁阻。最后,我将优化后的电机模型进行了最终的仿真验证。这些结果表明,我的优化工作取得了显著的效果,电机的性能得到了全面的提升。为了优化这个问题,我决定采用更加紧凑的结构设计,通过优化转子和定子的排列方式,将电机的体积缩小了15%。在优化过程中,我始终注重保持电机的性能参数,确保在优化后的电机中,功率输出和效率等关键参数
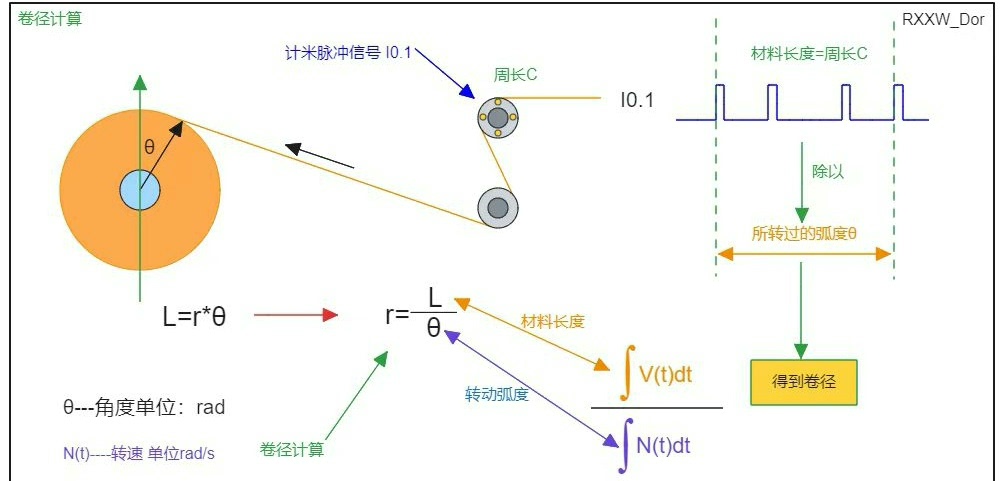
这里有个暗坑:材料厚度单位是毫米,而线速度是米/分钟,记得做好单位转换(0.001就是干这个的)。不过要小心振动干扰——有一次现场电机编码器线松了,转速信号跳变,结果算出来的卷径直接表演了个过山车曲线...收放卷设备里卷径计算绝对是核心算法,玩过张力控制的老铁都知道,这玩意儿要是算不准,轻则材料起皱,重则直接断带。最后扔个调试小技巧:把积分值乘以材料厚度实时输出到HMI曲线,你会看到一条完美的指数
通过模糊逻辑,我们可以让机器人或无人机在复杂环境中做出更智能的决策。虽然这个示例代码比较简单,但通过修改地图和坐标信息,可以很容易地将其扩展到更复杂的应用场景。希望这篇博文能给大家带来一些启发!
三相异步电动机计算软件,哈理工电磁计算软件,支持鼠笼型电机,绕线型电机,双速电机。ps:带部分案例库,可在案例库基础上新编辑;完全新建案例,输入项电机型号符号可复制案例库的符号编辑。在电机领域,三相异步电动机计算软件的重要性不言而喻。今天就来给大家聊聊一款颇为实用的软件——哈理工电磁计算软件。这款软件的适用范围相当广泛,无论是鼠笼型电机、绕线型电机,还是双速电机,它都能“拿捏得死死的”。
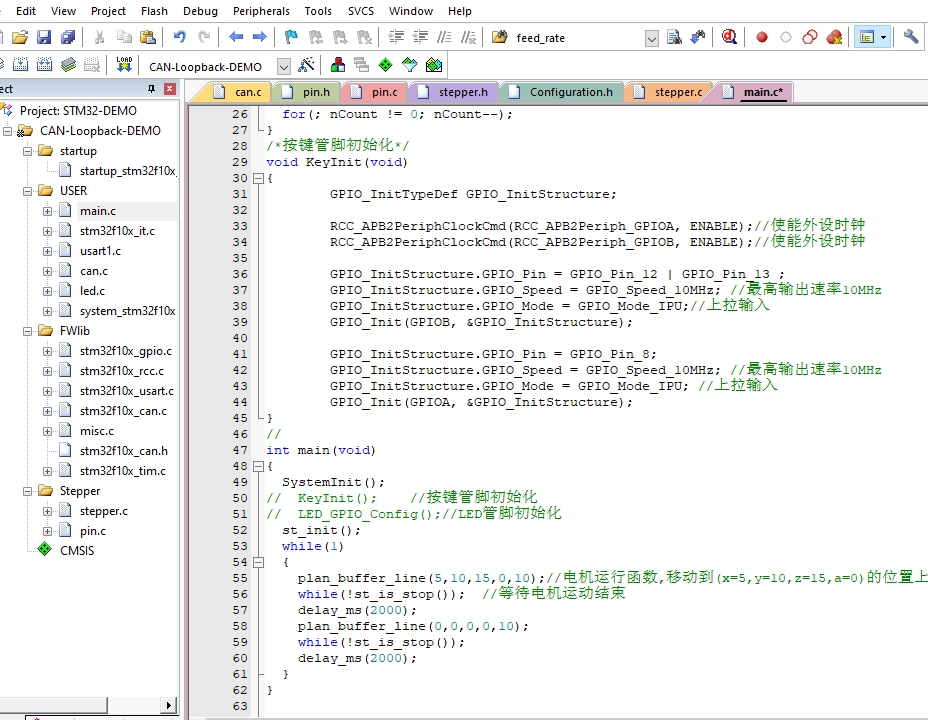
stm32f103c8步进电机的脉冲控制,有详细的算法说明,梯形加减速实时计算,算法来之avr446手册,自己写的,mdk直接编译,还写了word说明文档,算法清晰,项目中验证过,支持启动方向设置,支持min max限位开关,支持限位开关极性设置,支持jog点动模式,还有速度更快的升级算法。完整工程在Github(假装有链接),MDK工程直接编译,Word文档里连示波器抓的波形图都贴好了。这个方案
基于FPGA的数据采集系统/ADDA采集/采集卡如果需要其他类似相关功能的代码,可以右下角加好友加好友进行定制。采用FPGA与ADC设计一个可以在200K Hz采样率情况下以16bits精度同时对8通道的模拟信号进行采集的采集系统。在当今数字化的时代,数据采集系统无处不在,从科研实验到工业控制,都对数据采集的精度和速度有着极高的要求。今天咱们就来聊聊基于FPGA的数据采集系统,尤其是针对 200K
基于STM32H750芯片和SOEM的EtherCAT主站源码 提供配套CUBE工程和。SOEM协议栈使用1.3.1版本。可配套如图所示开发板使用。支持DC同步。可配合汇川IS620N、三洋RS3、赛孚德ASD620B、埃斯顿ProNet、迈信EP3E、台达A2-E、伟创SD700、松下A5B/A6B和欧姆龙G5系列驱动器使用,或提供想适配的驱动器型号。EtherCAT作为一种高效的实时工业以太网

实测能测方波、正弦波、锯齿波,误差控制在1%以内,这对仿真环境来说已经够用了。Proteus里仿真时记得打开示波器视图观察输入信号,有时候仿真模型的信号源和实际硬件差异挺大。硬件部分在Proteus里搭得挺简单:STM32F103C8核心板,加个1602液晶显示,信号输入接PA0脚。实测在10Hz-50kHz范围内误差基本在1%以内,高频时误差会稍微大点,不过作为简易测量够用了。使用 Proteu
