- @2500_94306685
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
本系统是一个完整的说话人识别解决方案,采用梅尔频率倒谱系数(MFCC)进行语音特征提取,结合高斯混合模型(GMM)进行说话人建模和识别。系统在MATLAB平台上实现,包含语音预处理、特征提取、模型训练和识别测试等完整流程。
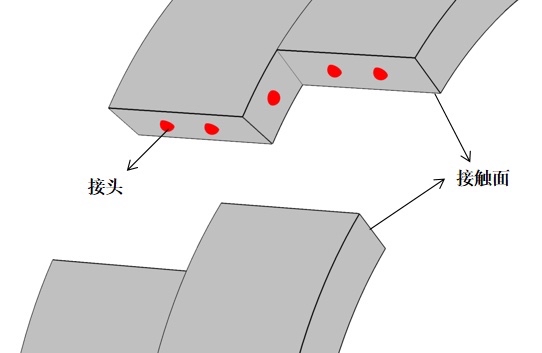
最近用正运动ECI1408板卡搭了个demo,支持标定数据持久化和三维建模,实测定位精度能稳定在±0.1mm,这就把核心代码和实现思路拆开来说说。Halcon联和C#做的运动控制加视觉定位小案例,板卡用的是正运动的ECI1408,,支持建模和标定的保存和加载,此案例非常适合想学运动控制视觉定位的人学习。每次启动程序自动加载最近一次的标定文件,能省去重复标定的麻烦。调试时最容易忽略的是机械臂运动方向
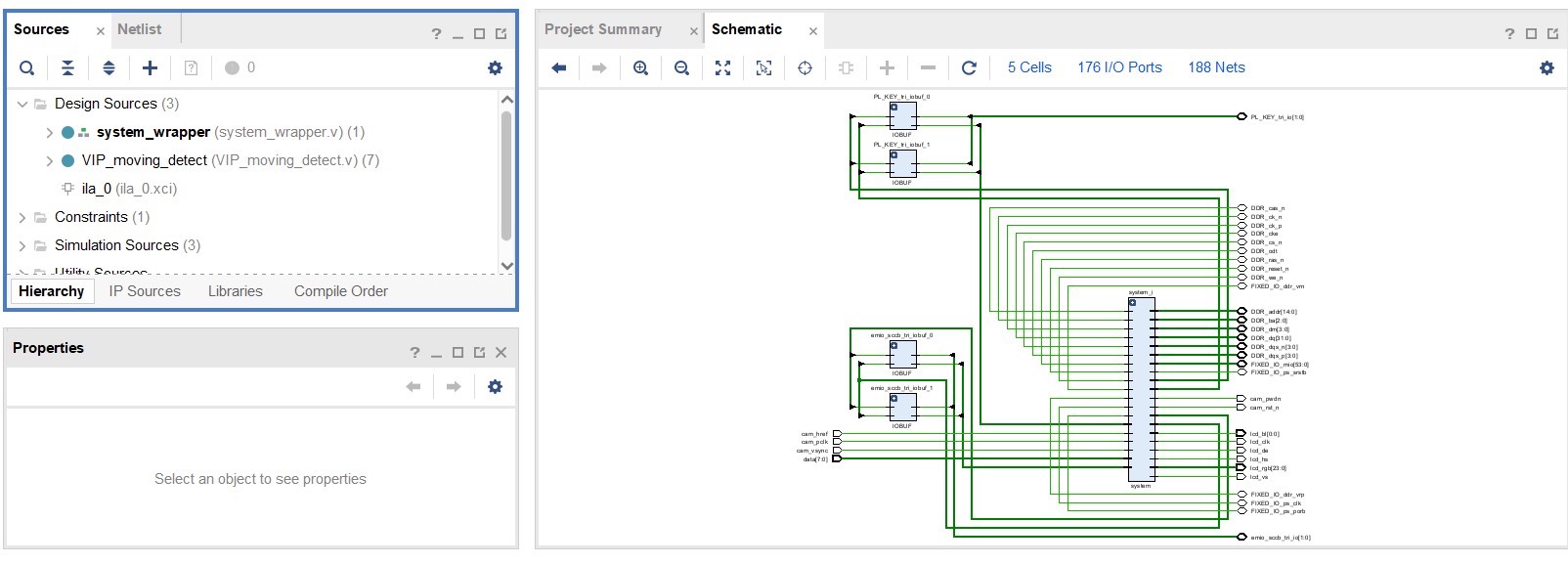
FPGA 运动目标检测将摄像头采集的彩色视频流转换为灰度视频流并进行图像处理来实现运动目标检测,并将检测后的结果与原彩色视频流叠加来显示实时检测结果。在数字图像处理和计算机视觉领域,运动目标检测是一个基础且关键的技术。今天咱们就来唠唠如何借助 FPGA 实现通过摄像头采集彩色视频流,把它转化为灰度视频流,完成图像处理并实现运动目标检测,最后还能将检测结果与原彩色视频流叠加显示实时效果。
这种分层次的学习率设置让ResNeXt在测试集上冲到91.2%准确率,不过训练时长是前两个模型的三倍。有意思的是,混淆矩阵显示它总把玻璃瓶误判为陶瓷碗,而VGG却不会——可能更深层的特征反而放大了某些材质纹理的相似性。有个反直觉的发现:在垃圾数据集上,适当降低数据清洗的严格程度反而能提升模型鲁棒性——毕竟现实场景的垃圾图片,本来就有各种遮挡和变形。训练时发现VGG的FC层特别吃内存,batch_s

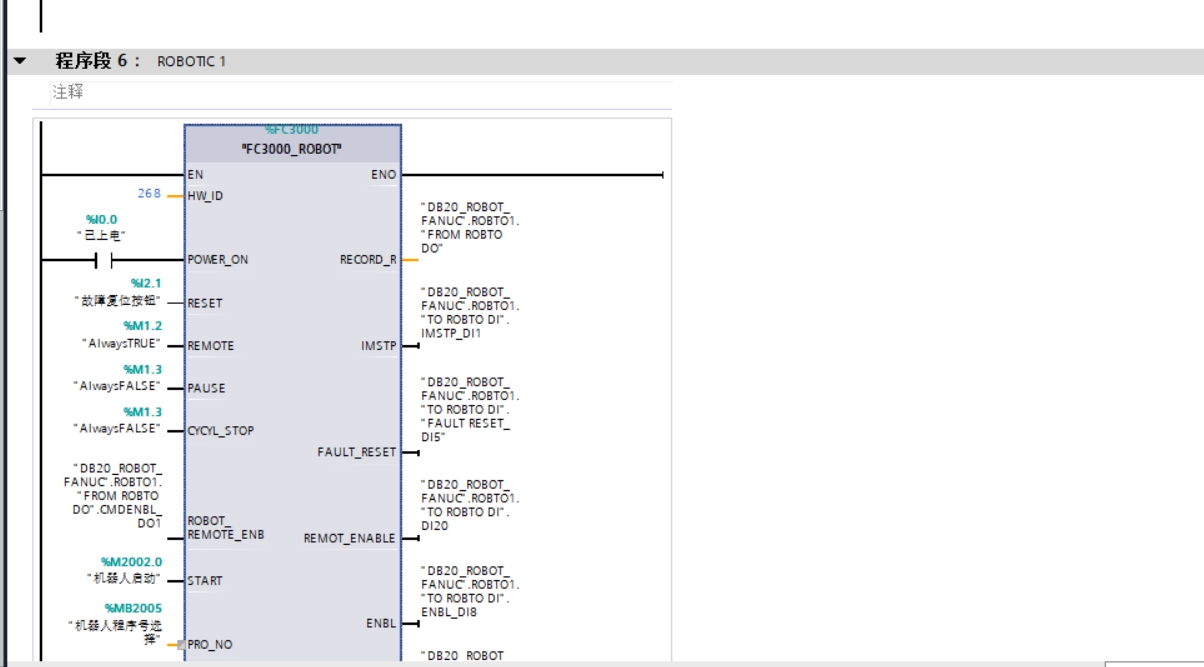
下次换台新机器人,直接把原来的COMM_HANDLER模块拖过去,改改设备参数就能跑。进FANUC的PROFINET菜单,把1511的GSD文件导入之后,直接拖放配置IO映射。关键参数得设置好DeviceName,必须和机器人那边设置的设备名称完全一致,差个空格都不行。西门子1511和FANUC机器人走profinet通讯例程程序,标准的程序结构,机器人通信封装成块直接调用即可。西门子1511和F
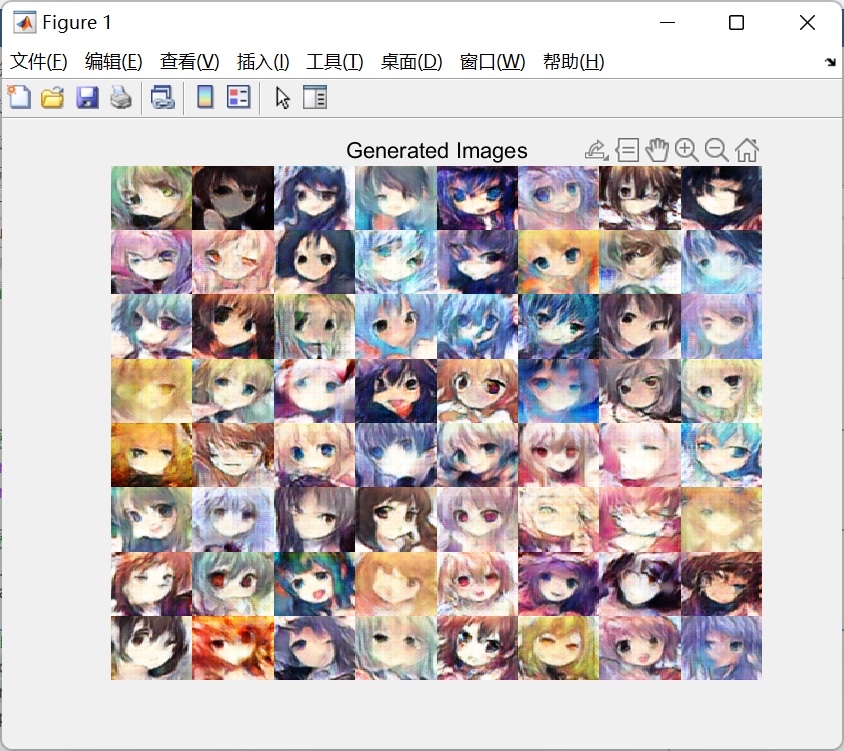
生成器的任务是接收一个随机噪声向量,输出一张图像。这里用了来实现反卷积操作,也就是上采样。最终输出的图像大小是28x28,和MNIST数据集里的图像大小一致。判别器的任务是判断输入的图像是真实的还是生成的。判别器最后用了一个,输出一个0到1之间的值,表示图像为真的概率。DCGAN的实现其实并不复杂,关键是要理解生成器和判别器的博弈过程。通过不断调整网络结构和训练参数,我们可以生成越来越逼真的图像。
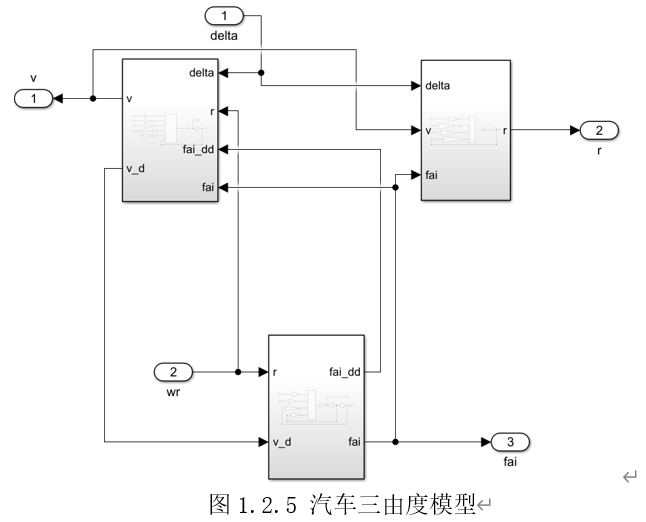
比如,当汽车在湿滑路面上行驶时,横摆角速度会迅速增加,这时PI控制器会通过调整质心侧偏角来减小横摆角速度,使汽车恢复稳定。通过在Matlab/Simlink软件仿真环境下对汽车稳定控制系统的仿真可出,以横摆角速度为控制变量,通过PI控制器调节质心侧偏角和横摆角速度,使得汽车始终保持在可操作的稳定状态,附带说明书。通过这种仿真,我们可以更好地理解汽车稳定控制系统的工作原理,并且在实际应用中优化控制器
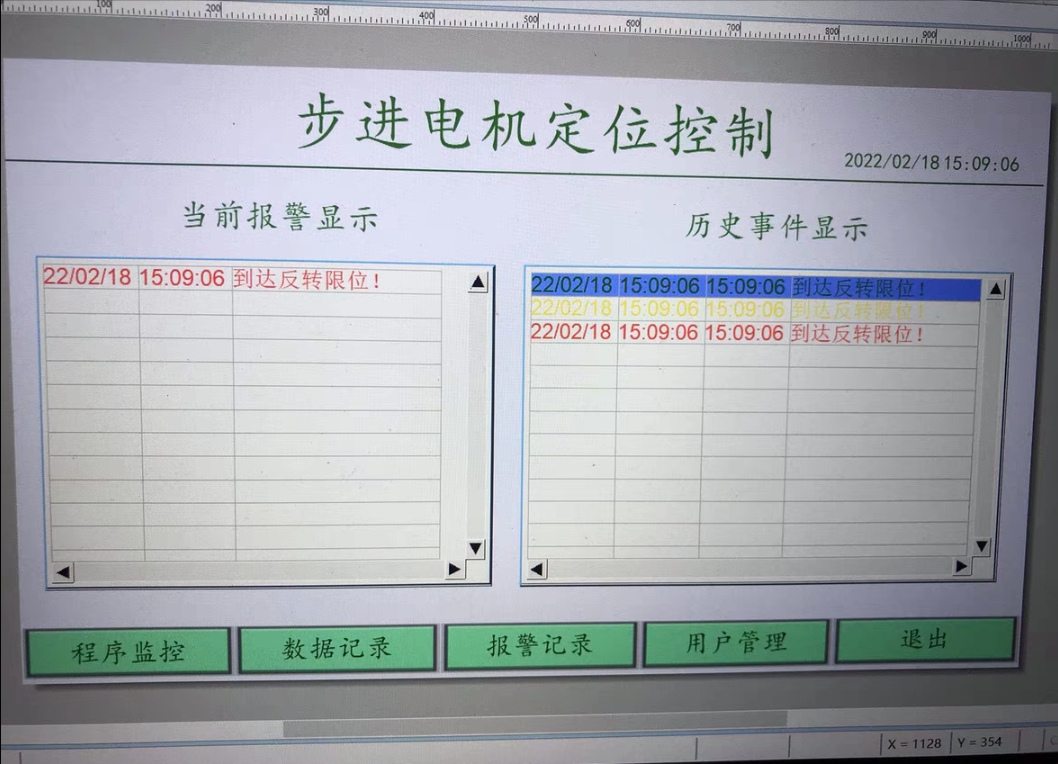
三菱步进电机驱动器控制的定位案例,带有触摸屏程序,plc程序!程序功能实现正反转控制,原点回归,急停报警等!触摸屏有报警显示,故障历史这些常用的画面设置,对控制多轴运动很有帮助,值得去学习一下在自动化控制领域,步进电机的精准定位控制至关重要。今天,咱就来唠唠三菱步进电机驱动器控制的定位案例,这里面不仅涉及 PLC 程序,还有触摸屏程序,内容丰富得很,对控制多轴运动帮助极大,一起学起来!
刚拿到EP100伺服驱动器量产型全套源码时,发现原厂代码里藏着几个要命的坑。折腾三天发现是定时器配置冲突——STM32F103的TIM1和TIM8居然共用同一个中断向量,这坑爹设计直接把原厂工程师带沟里了。硬件上注意驱动板的MOS管要扛得住反向电流,实测换相后电机反转扭矩提升13%。PCB文件里改了几个滤波电容位置,把原本滋啦滋啦的电流声给灭了。本主 完善和修改了原代码中的不能运行的bug,开机即
以前老师傅们靠经验,现在有了ABAQUS和COMSOL这种有限元工具,直接建个整体模型就能把抗震、承载、防水、稳定性全给算明白。ABAQUS的ODB结果能和Python联动,COMSOL直接调MATLAB脚本,这才是数字孪生的正确打开方式。之前见过用神经网络反演参数,结果训练数据不够,模型预测十年后隧道变成了麻花状,吓得施工队多打了三排支护桩。遇到过有人用固定值算,结果隧道沉降量比实测小一半,被甲