- @2401_86331863
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
本文介绍了一种低成本轨道式巡检机器人的制作方案,针对工业场景中人工巡检效率低、风险高等问题。该机器人采用模块化设计,包含机械行走、感知、控制和通信四大系统:机械结构适配工字钢轨道,选用标准件降低成本;硬件以STM32为核心,集成多种传感器实现环境监测;软件支持远程控制与异常报警。测试表明,机器人能稳定完成基础巡检任务,速度0.2m/s,报警响应≤1秒。文章还提出了减震优化、避障扩展等改进方向,为工
本文设计了一种基于STM32L431RCT6低功耗单片机的智能水表系统,通过霍尔传感器实现用水量精准计量(误差≤±0.8%),结合NB-IoT无线通信实现数据远程上传。系统具备异常用水检测(漏水/超流量)、剩余水量预警、远程阀控等功能,待机功耗仅45μA,采用锂电池供电续航可达7年。硬件设计包括计量模块、通信模块和阀控模块,软件采用低功耗模块化编程,实现"计量-分析-传输-控制"
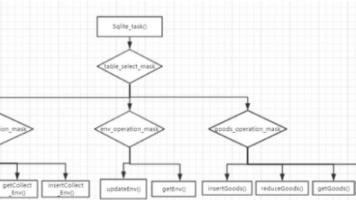
智能仓储管理系统基于物联网和大数据技术,采用三层架构设计(感知层-业务层-应用层),实现仓储作业全流程数字化管控。系统包含库存管理、作业管理、数据分析和权限管理四大核心模块,采用React+Spring Cloud技术栈开发,通过RFID、条码扫描等技术提升作业效率30%。测试显示系统响应时间≤1秒,功能通过率99.6%。未来可扩展AGV机器人调度、AI需求预测等功能,进一步提升智能化水平。该系统
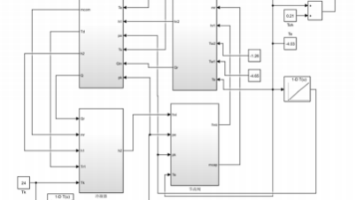
本文研究了栈式自编码器(SAE)在制冷系统故障诊断中的应用。首先介绍了深度学习的发展历程及其优势,包括处理复杂数据、自动特征提取和利用无标签数据的能力。针对制冷系统故障复杂、参数耦合等特点,提出基于SAE的故障诊断方法,包括数据预处理、网络参数设定、预训练和微调等步骤。针对船舶制冷系统故障数据获取困难的问题,采用Matlab/Simulink建立制冷系统仿真模型,通过仿真获取故障数据。研究表明,S
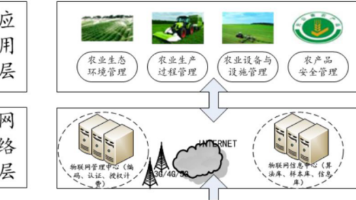
摘要: 物联网技术正推动农业向智能化、精准化转型,通过传感器、无线通信与AI实现环境监测、智能灌溉、精准养殖及农产品溯源等应用。核心支撑技术包括感知设备、低功耗通信、边缘计算与云端平台。当前面临成本高、标准不统一、网络覆盖不足等挑战,未来将向AI深度融合、数字孪生、无人化及绿色低碳方向发展。政策与市场化驱动下,农业物联网将加速实现高效、生态、安全的现代化目标。(149字)
本文设计了一种基于树莓派的远程温度监测系统,采用"感知层-传输层-应用层"三层架构。硬件以树莓派4B为核心,搭配DS18B20数字温度传感器,通过WiFi模块实现数据传输;软件基于Python开发,采用MQTT协议上传数据至云端,并搭建Web端实现可视化监控。系统测试显示温度误差≤0.3℃,数据传输成功率99.8%。未来可优化功耗、扩展多传感器并增强边缘计算能力。该系统具有低成

本文提出了一种基于5G网络的无人驾驶小车系统,采用"终端感知-5G传输-边缘计算-云端管控"四层架构,实现低时延远程控制和高可靠环境感知。系统硬件包括车载终端(集成多传感器)和边缘/云端计算节点,软件基于ROS2开发,利用5G URLLC技术实现高效通信。测试表明系统端到端时延≤20ms,支持50辆小车同时运行,任务完成率达99.8%。通过优化通信协议和算法,系统具备园区巡检、
物联网与云计算的融合,构建了从感知、传输、计算到应用的完整技术链条,是实现数字化、智能化转型的关键基础设施。其核心价值在于将分散的物理设备与弹性的云端能力结合,实现数据价值最大化与业务智能化。尽管在网络、安全、标准、能耗等方面仍面临挑战,但随着边缘计算、AIoT、云原生、5G等技术的持续成熟,二者融合将进一步向泛在连接、全域智能、可信协同方向发展,为工业、城市、医疗、农业、家居等领域带来深刻变革,
本文设计了一种基于STM32L431RCT6低功耗单片机的智能水表系统,通过霍尔传感器实现用水量精准计量(误差≤±0.8%),结合NB-IoT无线通信实现数据远程上传。系统具备异常用水检测(漏水/超流量)、剩余水量预警、远程阀控等功能,待机功耗仅45μA,采用锂电池供电续航可达7年。硬件设计包括计量模块、通信模块和阀控模块,软件采用低功耗模块化编程,实现"计量-分析-传输-控制"
本文设计了一种基于STM32F103C8T6单片机的智能垃圾桶系统。该系统通过红外测距和语音识别实现无接触开盖(响应时间≤0.4s),采用PWM缓动控制舵机实现桶盖平稳开闭。内置超声波传感器检测垃圾满溢状态(误差≤1cm),并触发声光报警。系统还具备自动打包功能,由步进电机驱动完成垃圾袋收口。测试显示待机功耗仅0.4W,语音识别准确率≥93%,打包成功率100%。该系统有效解决了传统垃圾桶的卫生隐