




- @2301_80079642
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
摘要: 雅可比矩阵是多变量微积分中描述向量值函数一阶导数的核心工具,由德国数学家雅可比提出。其本质是通过局部线性化近似非线性函数,广泛应用于控制科学、机器人学、数值优化、机器学习等领域。数学上,雅可比矩阵的行对应单个输出的梯度,列反映单个输入对所有输出的影响。关键运算包括雅可比-向量乘积(JVP)和向量-雅可比乘积(VJP),分别对应自动微分的前向与反向模式。雅可比与梯度、Hessian的区别在于

本文摘要: CUDA执行模型基于单指令多线程(SIMT)架构,采用主机-设备异构计算模式,通过网格(Grid)-块(Block)-线程(Thread)三级层次组织并行任务。流式多处理器(SM)是GPU的核心计算单元,以线程束(Warp)为基本调度单位执行SIMT指令。文章详细解析了线程索引计算、SM资源分配机制、Warp调度原理及分支分化问题,并介绍了Hopper架构的特性。关键点包括:三维线程索
分布式实时系统中的自省机制 自省机制是分布式实时系统(如DDS、ROS2)实现动态数据处理的核心技术。它通过将数据结构描述与数据本身分离,使系统能够在运行时感知和解析任意消息类型,而无需预先编译具体类型的处理代码。 核心技术实现: 编译期元数据生成 - IDL编译器自动创建包含类型名称、内存布局、字段描述等完整信息的静态元数据 消息-元数据绑定 - 通过虚函数接口建立消息对象与其类型描述的关联 通

Haply Inverse3 是一款三自由度桌面力反馈机器人系统,采用分层架构设计,通过WebSocket/HTTP协议实现应用层与底层硬件的解耦。系统集成了关节传感器、力矩执行器和安全监控机制,支持实时力控交互。其软件栈分为应用层、服务层、固件层和硬件层,核心通信通过WebSocket实现命令-状态同步模型,控制频率由客户端决定。设备需经过校准流程确保精度,状态灯提供硬件运行指示。该系统适用于人

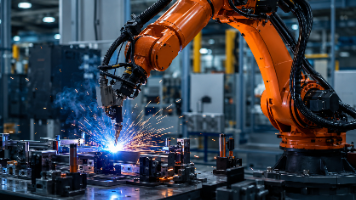
在线激光焊缝跟踪系统通过主动投射激光条纹并分析其形变实现高精度焊缝定位。系统采用"激光条纹成像+中心提取+特征定位+3D重建+坐标转换+闭环纠偏"的技术路线,相比被动视觉方案具有抗干扰能力强、精度高的优势。核心算法流程包括图像采集、ROI裁剪、滤波增强、激光条纹分割、亚像素级中心线提取(常用灰度重心法或Steger法)、焊缝特征点定位、三维坐标计算和机器人坐标转换。其中激光条纹中心线提取是关键环节
GDB调试指南:C++开发必备核心技能 GDB是Linux下功能最强大的开源调试器,支持C/C++等编译型语言。调试前需用-g编译选项生成调试信息。GDB提供三种启动方式:直接调试可执行文件、调试core文件、附加运行进程。核心命令包括程序控制(run/next/step)、断点管理(break)、变量查看(print)和栈回溯(bt)。特别针对C++特性,GDB支持类对象调试、STL容器查看和多

本文介绍了GoogleTest(GTest)框架在现代C++单元测试中的核心应用与实践要点。主要内容包括: 框架定位:GTest作为xUnit架构的C++测试框架,具有测试独立、结构化组织、跨平台等特性,分为执行层、断言层和组织层三层能力。 测试组织:通过TEST宏定义测试用例和套件,自动注册到全局注册表,使用RUN_ALL_TESTS执行测试。 断言体系:区分EXPECT(非致命)和ASSERT

内存性能是计算机响应速度的关键,需从容量、频率、时序、通道数、类型入门用户:优先容量(16GB DDR4-3200 双通道)。发烧玩家:追求高频低时序(如DDR5-6000 CL30 32GB双通道)。专业领域:选择ECC、高可靠性内存(如服务器RDIMM)。随着DDR5的普及,未来内存将向更高频率、更低功耗、集成ECC发展,同时HBM等高带宽内存将推动AI和高性能计算的突破。硬盘性能指标需结合类

摘要:机器人链路开发中,实验室测试与现场部署常存在差异,故障注入是提升系统可靠性的关键方法。本文解析故障注入的核心概念与实践价值,指出其通过主动制造异常来验证系统鲁棒性,覆盖传感器、通信、算法等全链路环节。重点阐述故障注入的工程化实施要点,包括明确故障类型、注入层级、预期响应等8个要素,区分故障(Fault)、错误(Error)、失效(Failure)三者的因果关系,并提供ROS2系统中传感器层和
BIOS核心作用与启动流程解析 BIOS是计算机启动时运行的底层固件,存储在主板的ROM芯片中,负责硬件初始化、自检(POST)和操作系统引导。其核心功能包括: 硬件管理:检测CPU、内存等关键设备状态,通过蜂鸣代码反馈故障; 启动控制:按用户设置的启动顺序(硬盘/U盘/网络)加载引导程序; 配置接口:通过CMOS存储用户设置(如超频参数、安全密码),依赖主板电池保持数据; 兼容支持:提供传统BI
